| Backlink to the CGSE Documentation Website | |
|---|---|
Developer Manual (this document) |
|
Changelog
- 08/10/2024 — v1.12
-
-
Added a section on the data dumper, see Section 5.4
-
- 06/09/2024 — v1.11
-
-
Filled the section on writing docstrings, see Chapter 4.
-
- 06/03/2024 — v1.10
-
-
Added a story about finding a left-open socket… see Chapter 28.
-
- 27/02/2024 — v1.9
-
-
Added part on Essential Toolkit and Infratsructure Elements, see Chapter 17 and Chapter 18.
-
Added some more info on Setup in Chapter 8.
-
- 12/02/2024 — v1.8
-
-
Started a chapter on SpaceWire communication, see Chapter 15.
-
Added a chapter on the notification system for control servers, see Chapter 7.
-
- 18/06/2023 — v1.7
-
-
Added a section on setting up a development environment to contribute to the CGSE and/or TS, see Chapter 26.
-
added a backlink to the CGSE Documentation web site for your convenience. It’s at the top of the HTML page.
-
- 04/05/2023 — v1.6
-
-
Added explanation about data distribution and monitoring message queues used by the DPU Processor to publish information and data, see Chapter 14.
-
Added some more meat into the description of the arguments for the
@dynamic_commanddecorator, see Section 6.6.2. -
Added an explanation of the communication with and commanding of the N-FEE in the inner loop of the DPUProcessor, see Section 14.1.1.
-
- 03/04/2023 — v1.5
-
-
Added a section 'Services' in the Commanding Concepts section, see Section 6.4.
-
- 12/03/2023 — v1.4
-
-
Added description of the arguments that can be used with the
@dynamic_commanddecorator, see Section 6.6.2. -
Added a section on creating multiple control servers for identical devices, see Section 6.1.1.
-
- 09/02/2023 — v1.3
-
-
Updated section on version and release numbers, see Chapter 2.
-
Fixed some formatting issues in the CCD numbering section.
-
Colophon
Copyright © 2022, 2023 by the KU Leuven PLATO CGSE Team
1st Edition — February 2023
This manual is written in PyCharm using the AsciiDoc plugin. The PDF Book version is processed with asciidoctor-pdf.
The manual is available as HTML from ivs-kuleuven/github.io. The HTML pages are generated with Hugo which is an OSS static web-pages generator. From this site, you can also download the PDF books.
The source code is available in a GitHub repository at ivs-kuleuven/plato-cgse-doc.
When you find an error or inconsistency or you have some improvements to the text, feel free to raise an issue or create a pull request. Any contribution is greatly appreciated and will be mentioned in the acknowledgement section.
Conventions used in this Book
We try to be consistent with the following typographical conventions:
- Italic
-
Indicates a new term or …
- Constant width
-
Used for code listings, as well as within paragraphs to refer to program elements like variable and function names, data type, environment variables (
ALL_CAPS), statements and keywords. - Constant width between angle brackets
<text> -
Indicates
textthat should be replaced with user-supplied values or by values determined by context. The brackets should thereby be omitted.
When you see a $ … in code listings, this is a command you need to execute in a terminal (omitting the dollar sign itself). When you see >>> … in code listings, that is a Python expression that you need to execute in a Python REPL (here omitting the three brackets).
- Setup versus setup
-
I make a distinction between Setup (with a capital S) and setup (with a small s). The Setup is used when I talk about the object as defined in a Python environment, i.e. the entity itself that contains all the definitions, configuration and calibration parameters of the equipment that make up the complete test setup (notice the small letter 's' here).
(sometimes you may find setup in the document which really should be 'set up' with a space)
- Using TABs
-
Some of the manuals use TABs in their HTML version. Below, you can find an example of tabbed information. You can select between FM and EM info and you should see the text change with the TAB.
| This feature is only available in the HTML version of the documents. If you are looking at the PDF version of the document, the TABs are shown in a frame where all TABs are presented successively. |
-
FM
-
EM
In this TAB we present FM specific information.
In this TAB we present EM specific information.
- Using Collapse
-
Sometimes, information we need to display is too long and will make the document hard to read. This happens mostly with listings or terminal output and we will make that information collapsible. By default, the info will be collapsed, press the small triangle before the title (or the title itself) to expand it.
| In the PDF document, all collapsible sections will be expanded. |
A collapsible listing
plato-data@strawberry:/data/CSL1/obs/01151_CSL1_chimay$ ls -l total 815628 -rw-r--r-- 1 plato-data plato-data 7961 Jun 20 10:38 01151_CSL1_chimay_AEU-AWG1_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 9306 Jun 20 10:38 01151_CSL1_chimay_AEU-AWG2_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 309375 Jun 20 10:38 01151_CSL1_chimay_AEU-CRIO_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 42950 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU1_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 43239 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU2_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 42175 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU3_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 42327 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU4_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 42242 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU5_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 42269 Jun 20 10:38 01151_CSL1_chimay_AEU-PSU6_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 67149 Jun 20 10:38 01151_CSL1_chimay_CM_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 20051 Jun 20 10:38 01151_CSL1_chimay_DAQ6510_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 105 Jun 20 10:38 01151_CSL1_chimay_DAS-DAQ6510_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 19721 Jun 20 10:38 01151_CSL1_chimay_DPU_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 22833 Jun 20 10:38 01151_CSL1_chimay_FOV_20230620_095819.csv -rw-rw-r-- 1 plato-data plato-data 833754240 Jun 20 10:34 01151_CSL1_chimay_N-FEE_CCD_00001_20230620_cube.fits -rw-r--r-- 1 plato-data plato-data 292859 Jun 20 10:38 01151_CSL1_chimay_N-FEE-HK_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 8877 Jun 20 10:38 01151_CSL1_chimay_OGSE_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 19841 Jun 20 10:38 01151_CSL1_chimay_PM_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 188419 Jun 20 10:38 01151_CSL1_chimay_PUNA_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 7662 Jun 20 10:38 01151_CSL1_chimay_SMC9300_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 19781 Jun 20 10:38 01151_CSL1_chimay_SYN_20230620_095819.csv -rw-r--r-- 1 plato-data plato-data 147569 Jun 20 10:38 01151_CSL1_chimay_SYN-HK_20230620_095819.csv plato-data@strawberry:/data/CSL1/obs/01151_CSL1_chimay$
Contributors
| Name | Affiliation | Role |
|---|---|---|
Rik Huygen |
KU Leuven |
Software architect |
Sara Regibo |
KU Leuven |
Senior software engineer and EGSE expert |
Pierre Royer |
KU Leuven |
Instrument expert |
Sena Gomashie |
SRON |
EGSE expert at test house |
Jens Johansen |
SRON |
EGSE expert at test house |
Nicolas Beraud |
IAS |
EGSE expert at test house |
Pierre Guiot |
IAS |
EGSE expert at test house |
Angel Valverde |
INTA |
EGSE expert at test house |
Jesus Saiz |
INTA |
EGSE expert at test house |
Preface
During the development/implementation process it became clear that the project was bigger then we anticipated and we would need to document how the Common-EGSE developed into this full-blown product.
During the analysis, design and implementation phase we learned about so many libraries like ZeroMQ, Matplotlib, Numpy, Pandas, Rich, Textual, … but also the standard Python library is so extremely rich of well-designed modules and language concepts that we integrated into our design and implementation.
Many of the applied concepts might seem obvious for the core developers of a/this product, but it might not be for the contributors of e.g. device drivers. A full in-depth description of the system and how it was developed is therefore indispensable.
The text itself gruw over the years, it started in reStructuredText and was processed with Sphinx, then we moved to Markdown and Mkdocs because of its simplicity and thinking this would encourage us to write and update the text more often. Finally, we ended up using Asciidoc which is a bit of a compromise between the previous two.
Introduction
This document is the developer guide for the PLATO Common-EGSE, used at CSL (Liège, Belgium) and the test houses at IAS (Paris, France), INTA (Madrid, Spain) and SRON (Groningen, The Netherlands) and describes the Common-EGSE system from the developer’s point of view. This document explains how to contribute to the code, which versions of libraries that are used, compiler options for device libraries written in C, access to the GitHub repo, coding style,and much more.
The current release contains 303 Python files, together they contain 95389 lines of which there are 49360 lines of Python code. About 50% of the code files contain actual code, the rest is documentation, comments and blank lines. It is impossible for one person to fully understand all details of the system and only for that reason is it essential to have good and comprehensive documentation.
Please, read the installation instructions to know how to install the software and configure your Python installation.
List of TODO topics
-
List the terminal commands in a simple overview table or something
-
Explain System Preferences in the settings.yaml file (and the local settings)
-
The Logger uses ZeroMQ to pass messages. That means these this ZeroMQ needs to be closed when your application ends.
-
Where do we descibe the Synoptics Manager, where does this process fit into the design fiures etc.
-
Somewhere we need to describe all the modules in the CGSE. For example, the
device.pymodule defines a lot of interesting classes, including Exceptions, the device connection interfaces, and the device transport. -
Somewhere it shall be clearly explained where all these processes need to be started, on the egse-server or egse-client, manually or by Systemd, … or clicking an icon?
-
Should we maybe divide the developer manual in part 1 with coding advice and part 2 with the description of the CGSE code?
-
Explain how the Failure — Success — Response classes work
-
Explain how you can run the GUIs and even some control servers on your local machine using port forwarding. As an example, use the TCS or the Hexapod. This is only for hardware device connections, it is not for core services, run them as normal on your local machine.
-
Find better names for the Parts in the manual
-
WHere do we discuss devices with Ethernet interfaces and USB interfaces, the differences, the pros and cons, are there other still in use, like GPIO?
-
Describe how to detect which process is holding a connection on Linux and macOS. This happens sometimes when a process crashes or when the developer did not properly close all connection, or when a process is hanging. You will get a
OSError: [Errno 48] Address already in use. -
Describe the RegisterMap of the N-FEE and how and when it is synced with the DPU Processor. What is the equivalent of the FPGA (loading the Registers on every long pulse) in the DPU Processor (DPU Internals vs NFEEState).
-
Describe what the num_cycles parameter is and how this is used in the DPU Processor. That this parameter can be negative and what this means and why this decision (to not have too many if statements in the run() of the DPU Processor.)
-
Describe that the DPU Processor is time critical
-
Describe why certain control servers start a sub-process → TCS, DPU, …
-
Describe how to switch your development environment from one TH to another, e.g. CSL1 → CSL2. Which environment variables need to be adapted, which directories need to exist etc.
Documents and Acronyms
Applicable documents
| [AD-01] |
PLATO Common-EGSE Requirements Specification, PLATO-KUL-PL-RS-0001, issue 1.4, 18/03/2020 |
| [AD-02] |
PLATO Common-EGSE Design Description, PLATO-KUL-PL-DD-0001, issue 1.2, 13/03/2020 |
| [AD-03] |
PLATO Common-EGSE Interface Control Document, PLATO-KUL-PL-ICD-0002, issue 0.1, 19/03/2020 |
Reference Documents
| [RD-01] |
PLATO Common-EGSE Installation Guide, PLATO-KUL-PL-MAN-0002 |
| [RD-02] |
PLATO Common-EGSE User Manual, PLATO-KUL-PL-MAN-0001 |
| [RD-03] | |
| [RD-04] |
Acronyms
AEU |
Ancillary Electronics Unit |
API |
Application Programming Interface |
CAM |
Camera |
CCD |
Charged-Coupled Device |
CGSE |
Common-EGSE |
CSL |
Centre Spatial de Liège |
CSV |
Comma-Separated Values |
COT |
Commercial off-the-shelf |
CTI |
Charge Transfer Inefficiency |
CTS |
Consent to Ship |
DPU |
Data Processing Unit |
DSI |
Diagnostic SpaceWire Interface |
EGSE |
Electrical Ground Support Equipment |
EOL |
End Of Life |
FAQ |
Frequently Asked Questions |
FEE |
Front End Electronics |
FITS |
Flexible Image Transport System |
FPA |
Focal Plane Assembly/Array |
GSE |
Ground Support Equipment |
GUI |
Graphical User Interface |
HDF5 |
Hierarchical Data Format version 5 (File format) |
HK |
Housekeeping |
IAS |
Institut d’Astrophysique Spatiale |
ICD |
Interface Control Document |
LDO |
Leonardo space, Italy |
MGSE |
Mechanical Ground Support Equipment |
MMI |
Man-Machine Interface |
NCR |
Non-Conformance Report |
NRB |
Non-Conformance Review Board |
OBSID |
Observation Identifier |
OGSE |
Optical Ground Support Equipment |
OS |
Operating System |
Portable Document Format |
|
PID |
Process Identifier |
PLATO |
PLAnetary Transits and Oscillations of stars |
PPID |
Parent Process Identifier |
PLM |
Payload Module |
PVS |
Procedure Variation Sheet |
REPL |
Read-Evaluate-Print Loop, e.g. the Python interpreter prompt |
RMAP |
Remote Memory Access Protocol |
SFT |
Short Functional Test |
SpW |
SpaceWire |
SQL |
Structured Query Language |
SRON |
Stichting Ruimte-Onderzoek Nederland |
SUT |
System Under Test |
SVM |
Service Module |
TBC |
To Be Confirmed |
TBD |
To Be Decided or To Be Defined |
TBW |
To Be Written |
TC |
Telecommand |
TCS |
Thermal Control System |
TH |
Test House |
TM |
Telemetry |
TOU |
Telescope Optical Unit |
TS |
Test Scripts |
TUI |
Text-based User Interface |
TV |
Thermal Vacuum |
UM |
User Manual |
USB |
Universal Serial Bus |
YAML |
YAML Ain’t Markup Language |
Caveats
Place general warnings here on topics where the user might make specific assumption on the code or the usage of the code.
Setup
-
It’s not a good idea to create keys with spaces and special characters, although it is allowed in a dictionary and it works without problems, the key will not be available as an attribute because it will violate the Python syntax.
>>> from egse.setup import Setup >>> s = Setup() >>> s["a key with spaces"] = 42 >>> print(s) NavigableDict └── a key with spaces: 42 >>> s['a key with spaces'] 42 >>> s.a key with spaces Input In [18] s.a key with spaces ^ SyntaxError: invalid syntax -
When submitting a Setup to the configuration manager, the Setup is automatically pushed to the GitHub repository with the message provided with the
submit_setup()function. No need anymore to create a pull request. There are however two thing to keep in mind here:-
do not add a Setup manually to your PLATO_CONF_FILE_LOCATION or to the repository. That will invalidate the repo and the cache that is maintained by the configuration manager
-
you should do a git pull regularly on your local machine and also on the egse-client if the folder is not NFS mounted
-
Part I — Development Notions
1. Style Guide
This part of the developer guide contains instructions for coding styles that are adopted for this project.
The style guide that we use for this project is PEP8. This is the standard for Python code and all IDEs, parsers and code formatters understand and work with this standard. PEP8 leaves room for project specific styles. A good style guide that we can follow is the Google Style Guide.
The following sections will give the most used conventions with a few examples of good and bad.
1.1. TL;DR
| Type | Style | Example |
|---|---|---|
Classes |
CapWords |
ProcessManager, ImageViewer, CommandList, Observation, MetaData |
Methods & Functions |
lowercase with underscores |
get_value, set_mask, create_image |
Variables |
lowercase with underscores |
key, last_value, model, index, user_info |
Constants |
UPPERCASE with underscores |
MAX_LINES, BLACK, COMMANDING_PORT |
Modules & packages |
lowercase no underscores |
dataset, commanding, multiprocessing |
1.2. General
-
name the class or variable or function with what it is, what it does or what it contains. A variable named
user_listmight look good at first, but what if at some point you want to change the list to a set so it can not contain duplicates. Are you going to rename everything intouser_setor woulduser_infobe a better name? -
never use dashes in any name, they will raise a
SyntaxError: invalid syntax. -
we introduce a number of relaxations to not brake backward compatibility for the sake of a naming convention. As described in A Foolish Consistency is the Hobgoblin of Little Minds: Consistency with this style guide is important. Consistency within a project is more important. Consistency within one module or function is the most important. […] do not break backwards compatibility just to comply with this PEP!
1.3. Classes
Always use CamelCase (Python uses CapWords) for class names. When using acronyms, keep them all UPPER case.
-
class names should be nouns, like Observation
-
make sure to name classes distinctively
-
stick to one word for a concept when naming classes, i.e. words like
ManagerorControllerorOrganizerall mean similar things. Choose one word for the concept and stick to it. -
if a word is already part of a package or module, don’t use the same word in the class name again.
Good names are: Observation, CalibrationFile, MetaData, Message, ReferenceFrame, URLParser.
1.4. Methods and Functions
A function or a method does something (and should only do one thing, SRP=Single Responsibility Principle), it is an action, so the name should reflect that action.
Always use lowercase words separated with underscores.
Good names are: get_time_in_ms(), get_commanding_port(), is_connected(), parse_time(), setup_mask().
When working with legacy code or code from another project, names may be in camelCase (with the first letter a lower case letter). So we can in this case use also getCommandPort() or isConnected() as method and function names.
1.5. Variables
Use the same naming convention as functions and methods, i.e. lowercase with underscores.
Good names are: key, value, user_info, model, last_value
Bad names: NSegments, outNoise
Take care not to use builtins: list, type, filter, lambda, map, dict, …
Private variables (for classes) start with an underscore: _name or _total_n_args.
In the same spirit as method and function names, the variables can also be in camelCase for specific cases.
1.6. CONSTANTS
Use ALL_UPPER_CASE with underscores for constants. Use constants always within a name space, not globally.
Good names: MAX_LINES, BLACK, YELLOW, ESL_LINK_MODE_DISABLED
1.7. Modules and Packages
Use simple words for modules, preferably just one word like datasets or commanding or storage or extensions. If two words are unavoidable, just concatenate them, like multiprocessing or sampledata or testdata. If needed for readability, use an underscore to separate the words, e.g. image_analysis.
1.8. Import Statements
-
group and sort import statements
-
never use the form
from <module> import * -
always use absolute imports in scripts
Be careful that you do not name any modules the same as a module in the Python standard library. This can result in strange effects and may result in an AttributeError. Suppose you have named a module math in the egse directory and it is imported and used further in the code as follows:
from egse import math
...
# in some expression further down the code you might use
math.exp(a)This will result in the following runtime error:
File "some_module.py", line 8, in <module>
print(math.exp(a))
AttributeError: module 'egse.math' has no attribute 'exp'Of course this is an obvious example, but it might be more obscure like e.g. in this GitHub issue: 'module' object has no attribute 'Cmd'.
2. Version numbers
The version of Python that you use to run the code shall be \$>=\$ 3.8. You can determine the version of Python with the following terminal command:
$ python3 -V Python 3.8.3
The version of the Common-EGSE (CGSE) and the test scripts (TS) that are installed on your system can be determined as follows:
$ python3 -m egse.version CGSE version in Settings: 2023.6.0+CGSE CGSE installed version = 2023.6.0+cgse $ python3 -m camtest.version CAMTEST version in Settings: 2023.6.0+TS CAMTEST git version = 2023.6.0+TS-0-g975d38e
The version numbers that are shown above have different parts that all have their meaning. We use semantic versioning to define our version numbers. Let’s use the CGSE version [2023.6.0+CGSE] to explain each of the parts:
-
2023.6.0is the core version number withmajor.minor.patchnumbers. The major number is the year in which the software was released. The minor number is the week number in which the configuration control board (CCB) gathered to approve a new release. The patch is used for urgent bug fixes within the week between two CCBs. -
For release candidates a postfix can be added like
2023.6.0-rc.1meaning that we are dealing with the first release candidate for the 2023.6.0 release. We should avoid using release candidates in the operational environment because these versions might not have been fully tested. In an official release of the software, this part in the versioning will be omitted. -
CGSEis a release for the Common-EGSE repository. The Test scripts will haveTShere. There is alsoCONFfor theplato-cgse-confrepository which contains all Setups and related files.
Then we have some additional information in the version number of the test scripts, in the above example [2023.6.0+TS-0-g975d38e].
-
0is the number of commits that have been pushed and merged to the GitHub repository since the creation of the release. This number shall be 0 at least for the CGSE on an operational system. If this number \$!=\$ 0, it means you have not installed the release properly as explained in the installation instructions and you are probably using a development version with less tested or even un-tested code. This number can differ from 0 for the test scripts as we do not yet have a proper installation procedure for the releases. -
g975d38eis the abbreviated git hash number[1] for this release. The first lettergindicates the use ofgit.
The VERSION and RELEASE are also defined in the settings.yaml and should match the first three parts of the version number explained above. If not, it was probably forgotten to update these numbers when preparing the release. You can use these version numbers in your code by importing from egse.version and camtest.version.
from egse.version import VERSION as CGSE_VERSION from camtest.version import VERSION as CAMTEST_VERSION
3. Best Practices for Error and Exception Handling
All errors and exceptions should be handled to prevent the Application from crashing. This is definitely true for server applications and services, e.g. device control servers, the storage and configuration manager. But also GUI applications should not crash due to an unhandled exception. It is important that, at least on the server side, all exceptions are logged.
3.1. When do I catch exceptions?
Exceptions shouldn’t really be caught unless you have a really good plan for how to recover. If you have no such plan, let the exception propagate to a higher level in your software until you know how to handle it. In your own code, try to avoid raising an exception in the first place, design your code and classes such that you minimise throwing exceptions.
If some code path simply must broadly catch all exceptions (i.e. catch the base Exception class) — for example, the top-level loop for some long-running persistent process — then each such caught exception must write the full stack trace to the log, along with a timestamp. Not just the exception type and message, but the full stack trace. This can easily be done in Python as follows:
try:
main_loop()
except Exception:
logging.exception("Caught exception at the top level main_loop().")This will log the exception and stacktrace with logging level ERROR.
For all other except clauses — which really should be the vast majority — the caught exception type must be as specific as possible. Something like KeyError, ConnectionTimeout, etc. That should be the exception that you have a plan for, that you can handle and recover from at this level in your code.
3.2. How do I catch Exceptions?
Use the try/except blocks around code that can potentially generate an exception and your code can recover from that exception.
Any resources such as open files or connections can be closed or cleaned up in the finally clause. Remember that the code within finally will always be executed, regardless of an Exception is thrown or not. In the example below, the function checks if there is internet connection by opening a socket to a host which is expected to be available at all times. The socket is closed in the finally clause even when the exception is raised.
import socket
import logging
def has_internet(host="8.8.8.8", port=53, timeout=3):
"""Returns True if we have internet connection, False otherwise."""
try:
socket_ = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
socket_.settimeout(timeout)
socket_.connect((host, port))
return True
except socket.error as ex:
logging.info(f"No Internet: Unable to open socket to {host}:{port} [{ex}]")
return False
finally:
if socket_ is not None:
socket_.close()3.3. What about the 'with' Statement?
When you use a with statement in your code, resources are automatically closed when an Exception is thrown, but the Exception is still thrown, so you should put the with block inside a try/except block.
As of Python 3 the socket class can be used as a context manager. The example above can thus be rewritten as follows:
import socket
import logging
def has_internet(host="8.8.8.8", port=53, timeout=3):
"""Returns True if we have internet connection, False otherwise."""
try:
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as socket_:
socket_.settimeout(timeout)
socket_.connect((host, port))
return True
except socket.error as ex:
logging.warning(f"No Internet: Unable to open socket to {host}:{port} [{ex}]")
return FalseAnother example from our own code base shows how to handle a Hexapod PUNA Proxy error. Suppose you want to send some commands to the PUNA within a context manager as follows:
from egse.hexapod.symetrie.puna import PunaProxy
with PunaProxy() as proxy:
proxy.move_absolute(0, 0, 2, 0, 0, 0)
# Send other commands to the Puna Hexapod.When you execute the above code and the PUNA control server is not active, the Proxy will not be able to connect and the context manager will raise a ConnectionError.
PunaProxy could not connect to its control server at tcp://localhost:6700. No commands have been loaded.
Control Server seems to be off-line, abandoning
Traceback (most recent call last):
File "t.py", line 3, in <module>
with PunaProxy() as proxy:
File "/Users/rik/Git/plato-common-egse/src/egse/proxy.py", line 129, in __enter__
raise ConnectionError("Proxy is not connected when entering the context.")
ConnectionError: Proxy is not connected when entering the context.So, the with .. as statement should be put into a try .. except clause. Since we probably cannot handle this exception at this level, we only log the exception and re-raise the connection error.
from egse.hexapod.symetrie.puna import PunaProxy
try:
with PunaProxy() as proxy:
proxy.move_absolute(0,0,2,0,0,0)
# Send other commands to the Puna Hexapod.
except ConnectionError as exc:
logger.exception("Could not send commands to the Hexapod PUNA because the control server is not reachable.")
raise (1)| 1 | use a single raise statement, don’t repeat the ConnectionError here |
3.4. Why not just return an error code?
In languages like the C programming language is it custom to return error codes or -1 as a return code from a function to indicate a problem has occurred.
The main drawback here is that your code, when calling such a function, must always check it’s return codes, which is often forgotten or ignored.
In Python, throw exceptions instead of returning an error code. Exceptions ensure that failures do not go unnoticed because the calling code didn’t check a return value.
3.5. When to Test instead of Try?
The question basically is if we should check for a common condition without possibly throwing an exception. Python does this different than other languages and prefers the use of exceptions. There are two different opinions about this, EAFP and LBYL. From the Python documentation:
EAFP: it’s Easier to Ask for Forgiveness than Permission.
This common Python coding style assumes the existence of valid keys or attributes and catches exceptions if the assumption proves false. This clean and fast style is characterized by the presence of many try and except statements. The technique contrasts with the LBYL style common to many other languages such as C.
LBYL: Look Before You Leap.
This coding style explicitly tests for pre-conditions before making calls or lookups. This style contrasts with the EAFP approach and is characterized by the presence of many if statements. In a multi-threaded environment, the LBYL approach can risk introducing a race condition between “the looking” and “the leaping”.
Consider the following two cases:
if response[-2:] != '\r\n':
raise ConnectionError(f"Missing termination characters in response: {response}")def convert_to_float(value: str) -> float:
try:
return float(value)
except ValueError:
return math.nanIf you expect that 90% of the time your code will just run as expected, use the try/except approach. It will be faster if exceptions really are exceptional. If you expect an abnormal condition more than 50% of the time, then using if is probably better.
In other words, the method to choose depends on how often you expect the event to occur.
-
Use exception handling if the event doesn’t occur very often, that is, if the event is truly exceptional and indicates an error (such as an unexpected end-of-file). When you use exception handling, less code is executed in normal conditions.
-
Check for error conditions in code if the event happens routinely and could be considered part of normal execution. When you check for common error conditions, less code is executed because you avoid exceptions.
3.6. When to re-throw an Exception?
Sometimes you just want to do something and rethrow the same Exception. This is easy in Python as shown in the following example.
try:
# do some work here
except SomeException:
logging.warning("...", exc_info=True)
raise (1)| 1 | use only a raise statement, without the SomeException added. This will rethrow the exact same exception that was catched. |
In some cases, it is best to have the stacktrace printed out with the logging message. I’ve include the exc_info=True in the example.
3.7. What about Performance?
It is nearly free to set up a try/except block (an exception manager), while an if statement always costs you.
Bear in mind that Python internally uses exceptions frequently. So, when you use an if statement to check e.g. for the existence of an attribute (the hasattr() method), this builtin function will call getattr(obj, name) and catch AttributeError. So, instead of doing the following:
if hasattr(command, 'name'):
command_name = getattr(command, 'name')
else:
command_name = Noneyou can better use the try/except.
try:
command_name = getattr(command, 'name')
except AttributeError:
command_name = None3.8. Can I raise my own Exception?
As a general rule, try to use builtin exceptions from Python, especially ValueError, IndexError, NameError, and KeyError. Don’t invent your own 'parameter' or 'arguments' exceptions if the cause of the exception is clear from the builtin. The hierarchy of Exceptions can be found in the Python documentation at Builtin-Exceptions > Exception Hierarchy.
When the connection with a builtin exception is not clear however, create your own exception from the Exception class.
class DeviceNotFoundError(Exception):
"""Raised when a device could not be located or loaded."""
pass
Even if we are talking about Exceptions all the time, your own Exceptions should end with Error instead of Exception. The standard Python documentation also has a section on User Defined Exceptions that you might want to read.
|
In some situations you might want to group many possible sources of internal errors into a single exception with a clear message. For example, you might want to write a library module that throws its own exception to hide the implementation details, i.e. the user of your library shouldn’t have to care which extra libraries you use to get the job done.
Since this will hide the original exception, if you throw your own exception, make sure that it contains every bit of information from the originally caught exception. You’ll be grateful for that when you read the log files that are send to you for debugging.
The example below is taken from the actual source code. This code catches all kinds of exceptions that can be raised when connecting to a hardware device over a TCP socket. The caller is mainly interested of course if the connection could be established or not, but we always include the information from the original exception with the raise..from clause.
def connect(self):
# Sanity checks
if self.is_connection_open:
raise PMACException("Socket is already open")
if self.hostname in (None, ""):
raise PMACException("ERROR: hostname not initialized")
if self.port in (None, 0):
raise PMACException("ERROR: port number not initialized")
# Create a new socket instance
try:
self.sock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.sock.setblocking(1)
self.sock.settimeout(3)
except socket.error as e_socket:
raise PMACException("ERROR: Failed to create socket.") from e_socket
# Attempt to establish a connection to the remote host
try:
logger.debug(f'Connecting a socket to host "{self.hostname}" using port {self.port}')
self.sock.connect((self.hostname, self.port))
except ConnectionRefusedError as e_cr:
raise PMACException(f"ERROR: Connection refused to {self.hostname}") from e_cr
except socket.gaierror as e_gai:
raise PMACException(f"ERROR: socket address info error for {self.hostname}") from e_gai
except socket.herror as e_h:
raise PMACException(f"ERROR: socket host address error for {self.hostname}") from e_h
except socket.timeout as e_timeout:
raise PMACException(f"ERROR: socket timeout error for {self.hostname}") from e_timeout
except OSError as e_ose:
raise PMACException(f"ERROR: OSError caught ({e_ose}).") from e_ose
self.is_connection_open = True3.9. When should I use Assertions?
Use assertions only to check for invariants. Assertions are meant for development and should not replace checking conditions or catching exceptions which are meant for production. A good guideline to use assert statements is when they are triggering a bug in your code. When your code assumes something and acts upon the assumption, it’s recommended to protect this assumption with an assert. This assert failing means your assumption isn’t correct, which means your code isn’t correct.
def _load_register_map(self):
# This method shall only be called when self._name is 'N-FEE' or 'F-FEE'.
assert self._name in ('N-FEE', 'F-FEE')Another example is:
# If this assertion fails, there is a flaw in the algorithm above
assert tot_n_args == n_args + n_kwargs, (
f"Total number of arguments ({tot_n_args}) doesn't match "
f"# args ({n_args}) + # kwargs ({n_kwargs})"
)
Remember also that running Python with the -O option will remove or disable assertions. Therefore, never put expressions from your normal code flow in an assertion. They will not be executed when the optimizer is used and your code will break gracefully.
|
3.10. What are Errors?
This is a naming convention thing… names of user defined sub-classes of Exception should end with Error.
3.11. Cascading Exceptions
TBW
3.12. Logging Exceptions
Generally, you should not log exceptions at lower levels, but instead throw exceptions and rely on some top level code to do the logging. Otherwise, you’ll end up with the same exception logged multiple times at different layers in your application.
3.13. Resources
Some of the explanations were taken shamelessly from the following resources:
4. Writing docstrings
For this project we use the Google format for docstrings. Below, you can find a quick example of the docstring for the humanize_bytes() function in the egse.bits module.
def humanize_bytes(n: int, base: Union[int, str] = 2, precision: int = 3) -> str:
"""
Represents the size `n` in human readable form, i.e. as byte, KiB, MiB, GiB, ...
Please note that, by default, I use the IEC standard (International Engineering Consortium)
which is in `base=2` (binary), i.e. 1024 bytes = 1.0 KiB. If you need SI units (International
System of Units), you need to specify `base=10` (decimal), i.e. 1000 bytes = 1.0 kB.
Args:
n (int): number of byte
base (int, str): binary (2) or decimal (10)
precision (int): the number of decimal places [default=3]
Returns:
a human readable size, like 512 byte or 2.300 TiB.
Raises:
ValueError: when base is different from 2 (binary) or 10 (decimal).
Examples:
>>> assert humanize_bytes(55) == "55 bytes"
>>> assert humanize_bytes(1024) == "1.000 KiB"
>>> assert humanize_bytes(1000, base=10) == "1.000 kB"
>>> assert humanize_bytes(1000000000) == '953.674 MiB'
>>> assert humanize_bytes(1000000000, base=10) == '1.000 GB'
>>> assert humanize_bytes(1073741824) == '1.000 GiB'
>>> assert humanize_bytes(1024**5 - 1, precision=0) == '1024 TiB'
"""
The first line shall be a short summary of the functionality ended by a period or question mark. The rest, more detailed information, shall go after a blank line that separates it from the summary line.
You can use the following sections:
-
Args: a list of the parameter names with a short description and possibly defaults values.
-
Returns: or Yields: describe the returns value(s) their content and type. This section can be ommitted when the docstring starts with the word 'Returns' or 'Yields", or when the function doesn’t return anything (None).
-
Raises: a list of the Exceptions that might be raised by this function.
-
Examples: provide some simple examples and their possible outcome.
4.1. What needs to go into the docstring and what not?
The docstring shall contain all information that the user of the function, method, class or module needs to use it. The user in this case can be a developer or a normal user of a Python function. Try to adapt the type and detail of the information in the docstring accordingly.
Do not describe how the functionality is implemented, instead describe what functionality is provided and how it can be used.
4.2. Where will the docstring show up?
We will provide an API documentation that contains all docstrings of all classes, functions, methods and modules that are part of the CGSE. If you are using a Python IDE, use the available functionality to visualize the docstring information of a function. For PyCharm e.g. this is the 'F1' key when the cursor is on the function name.
If you are in the IPython REPL, you can type the function name followed by q question mark:
In [2]: humanize_bytes?
Signature: humanize_bytes(n: int, base: Union[int, str] = 2, precision: int = 3) -> str
Docstring:
Represents the size `n` in human readable form, i.e. as byte, KiB, MiB, GiB, ...
Please note that, by default, I use the IEC standard (International Engineering Consortium)
which is in `base=2` (binary), i.e. 1024 bytes = 1.0 KiB. If you need SI units (International
System of Units), you need to specify `base=10` (decimal), i.e. 1000 bytes = 1.0 kB.
Args:
n (int): number of byte
base (int, str): binary (2) or decimal (10)
precision (int): the number of decimal places [default=3]
Returns:
a human readable size, like 512 byte or 2.300 TiB
Raises:
ValueError when base is different from 2 (binary) or 10 (decimal).
Examples:
assert humanize_bytes(55) == "55 bytes"
assert humanize_bytes(1024) == "1.000 KiB"
assert humanize_bytes(1000, base=10) == "1.000 kB"
assert humanize_bytes(1000000000) == '953.674 MiB'
assert humanize_bytes(1000000000, base=10) == '1.000 GB'
assert humanize_bytes(1073741824) == '1.000 GiB'
assert humanize_bytes(1024**5 - 1, precision=0) == '1024 TiB'
File: ~/Documents/PyCharmProjects/plato-common-egse/src/egse/bits.py
Type: function
In [3]:
Part II — Core Concepts
5. Core Services
What are considered core services?
The core services are provided by five control servers that run on the egse-server machine: the log manager, the configuration manager, the storage manager, the process manager, and the synoptics manager. Each of these services is installed as a systemd service on the operational machine. That means they are monitored by the system and when one of these processes crashes, it is automatically restarted. As a developer, you can start the core services on your local machine or laptop with the invoke command from a terminal.
$ cd ~/git/plato-common-egse $ invoke start-core-egse
The services are described in full detail in the following sections.
5.1. The Log Manager
TBW
-
local logging using the standard logging module
-
log messages sent to the log manager log_cs via ZeroMQ
-
why am I not seeing some log messages in my terminal or Python console? → only level INFO and higher
-
should I configure the logger, how?
-
Cutelog and Textualog → user manual?
5.2. The Configuration Manager
The configuration manager is a core service…
-
The GlobalState
-
The Setup
-
The Observation concept
5.3. The Storage Manager
The storage manager is responsible for storing the following data:
-
all housekeeping from the devices that are connected by a control server
-
all housekeeping and CCD data that is transferred from the N-FEE and the F-FEE during camera tests.
-
Origin = defined in the ICD, include a list of predefined origin strings
-
Persistence: CSV / HDF5 / FITS / TXT / SQLite
5.3.1. File Naming
-
see also the ICD
5.3.2. File Formats
-
see also the ICD
5.4. The Data Dumper
We have some problems with performance in reading out the N-FEE when we request both sides of a CCD. The reason for that is probably a series of events, such as waiting for a busy storage manager, garbage collection, data processing, etc. When starting to develop the code for the fast camera, we want to avoid these performance problems as much as possible and we made a number of decisions that are explained below.
-
The DPU Processor should not have to wait for confirmation of the storage manager when saving data. So, we should change from a REQ-REP protocol to a PUSH-PULL protocol.
-
The DPU Processor shall do less processing of information before sending messages to other components. Actually, the process that reads out the spacewire data packets from the F-FEE shall be as simple as possible and delegate all possible tasks to other processes.
-
Communication between processes can be optimised using inter-process communication (IPC) instead of Transmission Control Protocol (TCP).
So, we started out designing the new F-DPU Processes.
There are two main problems that we identified with the Data Storage. (1) The Storage Manager forms a bottleneck handling all data that is generated by the system, not only writing science data to the HDF5 files, but also handling (and duplicating) all housekeeping and auxiliary data that is generated by all the devices used during the test. (2) Using the request-reply (REQ-REP) protocol, the process that generates the data and sends it to the storage manager has to wait for a reply from the Storage Manager with a confirmation of the data being written properly. This might lead to a delay when the Storage manager is very busy writing information to different files and formats.
We decided to keep the functionality of the Storage Manager as it is, don’t touch it since it is still used for all N-CAM activities. In addition, we will build a new process that will only handle the F-FEE HDF5 data from the F-DPU Processor. That new process we call the Data Dumper (data_dump). All data that we retrieve from the F-FEE will be sent from the F-DPU Processor to the data dumper using a PUSH-PULL protocol. This ZeroMQ message protocol can push messages to multiple workers, but we will only connect with one worker, i.e. the data dumper.
Our seconds design point above says the F-DPU Processor shall do as few processing as possible and delegate those tasks to other processes. The reason is to make sure the F-DPU Processor can readout the F-FEE data fast enough to avoid any buffer overflow errors. For that reason we put a process in between the F-DPU Processor and the data dumper which will take over the identification of data packets, and processing those packets before they are sent to the data dumper. Communication between the F-DPU Processor and the new data processor is also based on the PUSH-PULL message protocol.
It’s time to put that into a diagram in the hope it will clarify. Don’t worry, we will talk you trough it.
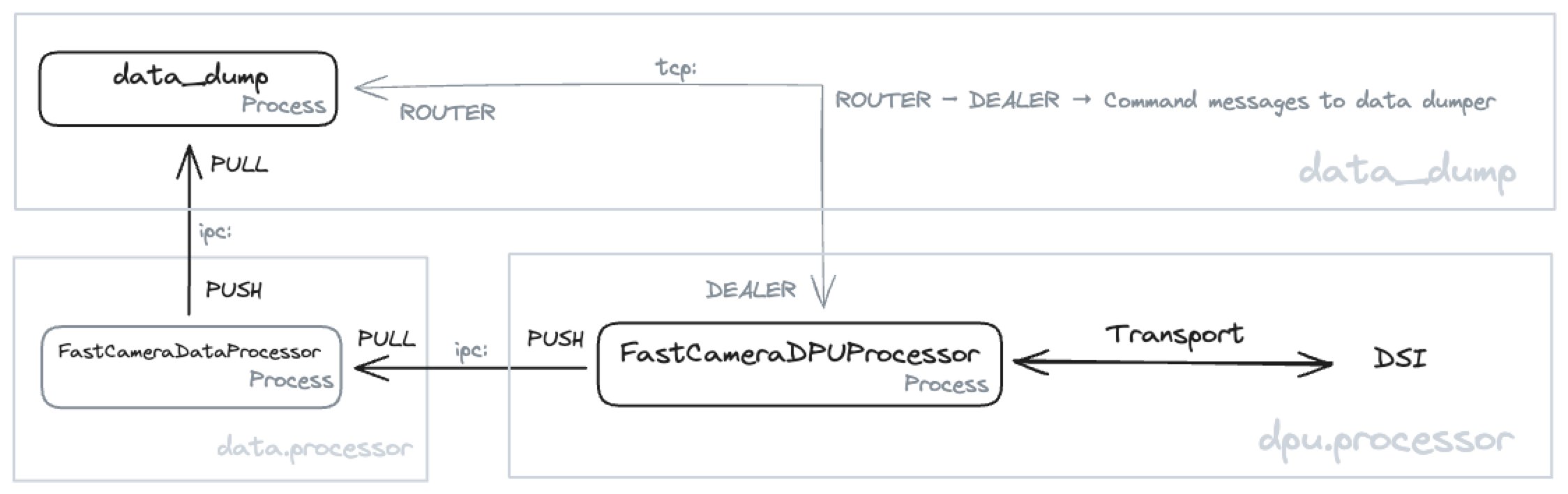
The figure above contains the three processes described above, the F-DPU (FastCameraDPUProcessor), the data processor (FastCameraDataProcessor) and the data dumper (data_dump). The communication between these processes is based on the ZeroMQ PUSH-PULL protocol. Since these processes always run on the CGSE server, we use the faster inter-process communication (IPC) instead of the transmission-control protocol (TCP). We see that data is pushed from the F-DPU to the Data Processor to the data dumper. The F-DPU Processor gets the data from the F-FEE, so there is transport of data and information between the F-DPU and the DSI, which is the SpaceWire interface connected to the F-FEE.
| Please note the Storage Manager still receives and handles all housekeeping and auxiliary data that is sent out by the core and device control servers, and the file generation services. The data_dump process described here will only handle data that is sent by the F-DPU and originates from the F-FEE. |
Of course, the data dumper shall also be able to retrieve commands, mainly from the F-DPU, to synchronise data flow or update configuration settings. This is done through the ZeroMQ DEALER-ROUTER protocol which allows to send commands to the data dumper and request a return value only when needed. For example, if the data dumper needs to update its Setup to the latest version, you wouldn’t require a reply when you send a reload-setup command. On the other hand, if you request status information from the data dumper you do expect a reply.
5.4.1. The data flow
This section explains what kind of data the data dumper receives and how this is handled. All data is stored into an HDF5 file. The format of this file is explained in the CGSE ICD [PLATO-KUL-PL-ICD-0002] section 4.2.
- Timecode
-
The timecode is an integer between 0 and 63 and it is sent by the F-FEE immediately after the reception of a synchronisation pulse. The timecode marks the start of a readout cycle. So, when the data dumper receives a timecode, it closes its current HDF5 file and creates a new HDF5 file. The HDF5 files are created in the
daily/YYYYMMDDfolder at the location given by thePLATO_DATA_STORAGE_LOCATIONenvironment variable. An example name for an HDF5 file that was created on our system that was connected to the EM in Leuven:/data/KUL/daily/20241007/20241007_KUL_F-FEE_SPW_00042.hdf5.Remember, each timecode creates a new HDF5 file. That is every 2.5 seconds.
- Housekeeping Packets
-
The data dumper receives housekeeping packets for the DEB and the active AEBs. This housekeeping is only retrieved when the F-FEE is actually sending out image data. The housekeeping is stored in the same group as its image data (see further). The dataset names are
hk_aebandhk_deb. - Housekeeping Data
-
The first thing the F-DPU Processor does when it receives a timecode, is requesting the register map and the housekeeping data from the DEB and all AEBs. The difference from housekeeping packets that are sent by the F-FEE is that housekeeping data, that is retrieved by RMAP commanding, doesn’t have a packet header. The housekeeping data is saved in the group
hk-dataand contains the datasets 'DEB', 'AEB1', 'AEB3', 'AEB3', and 'AEB4' and you should find this in every single HDF5 file. - Register Map
-
The register map, which is the configuration memory area of the F-FEE, is retrieved from the F-FEE by the F-DPU using a few RMAP memory read requests. The register map is stored in the HDF5 file in a dataset named 'register'. Each HDF5 file shall have this dataset, and it contains the configuration as was commanded and as it will be active starting on the next timecode/HDF5 file.
- Commands
-
The data dumper also retrieves all commands that have been send to the F-FEE with their arguments. This information is stored in the group
commands. The first six commands will always becommand_sync_register_map(),command_deb_read_hk(), andcommand_aeb_read_hk('AEB1')for each AEB. - CCD Image data
-
When the F-FEE is configured in science mode (DEB=FULL_IMAGE, AEBx=IMAGE and DTC_IN_MODE set accordingly), the data dumper will receive all image data as SpaceWire data packets, each containing the readouts of one row of the CCD. All these packets are stored in the group data which is a subgroup of
AEBx-Swhere 'x'=1,2,3,4 and 'S'='E' or 'F'. For example, when image data is sent for the E-side of AEB2, the groupAEB2_Ewill contain a groupdatawith all the image data packets, and also the groupshk_debandhk_aeb(see above). In the default readout mode, there shall be 2260 datasets with image data inside thedatagroup.When image data is available in the HDF5 file, the File group will have the attribute
has_dataset to True, if no image data was sent, this attribute will be False.Also the
datagroup has two attributes attached when image data is available, i.e.ccd_sideand theoverscan_linesOn the F-FEE EM we suffered from buffer overflow errors when receiving image data, resulting in corrupt data packets being sent to the data dumper. These packets are stored in the group
spw-data. What we saw for the EM is that these corrupt packets were sometime longer, sometimes shorter than the valid data packets, but the amount of packets matched the amount of missing packets in thedatagroup. - Observation ID
-
When an observation is started, the OBSID will be sent to the data dumper. The OBSID will be saved in the
obsidgroup.
5.4.2. Commanding the data dumper
The data dumper listens to commands coming in on the DATA_DUMPER.COMMANDING_PORT. A number of the available commands are also provided as terminal commands. That is described for each of the commands below.
The following commands are currently recognised:
- HELO
-
This command is used to register a process that wants to communicate with the data dumper. The data dumper keeps a registry of all registered processes. The command expects the name of the process that registers. A reply is sent on request.
- BYE
-
This command is used to unregister from the data dumper. No reply is sent.
- LOCATION
-
This command will set the new location for the HDF5 files after checking if the location exists and is writable. An acknowledgment will be sent on request.
The corresponding terminal command:
data_dump set-location <fully qualified folder name> - RELOAD-SETUP
-
This command is used to instruct the data dumper to reload the latest Setup from the configuration manager. An acknowledgment will be sent on request.
The corresponding terminal command:
data_dump reload-setup - STATUS
-
This command requests status information from the data dumper. The reply string will look like this:
Data Dumper: Version : 0.4.0 Hostname : 10.33.179.160 Commanding port : 30305 Monitoring port : 30304 Data dump port : 30104 Data location : /data/KUL/daily/20241008 Site ID : KUL Setup loaded : 00035 Scheduler : ['Scheduler.set_new_location → 2024-10-09 00:02:00+00:00'] Dealers : DATA-DUMP-STATUS, F-DPU
The corresponding terminal command is:
data_dump status - QUIT
-
This command will terminate the data dumper process. All open files and connections will be closed and the scheduler will be stopped. This command will only be accepted if it is sent by a registered process. No reply is sent.
5.4.3. Start and stop the data_dump
The data dumper is made part of the core services. That means it will show up in the Process Manager GUI in the section on the core services. It also means that, for operational systems that are working with the F-CAM, the data_dump process will be started and maintained by systemd, i.e. the process will automatically start at system startup and restarted when quit or crashed. No need to worry about it 🙂.
If you want to check if the data dumper is running and properly configured, use the status command:
$ data_dump status Data Dumper: Version : 0.4.0 Hostname : 10.33.179.160 Commanding port : 30305 Monitoring port : 30304 Data dump port : 30104 Data location : /data/KUL/daily/20241008 Site ID : KUL Setup loaded : 00035 Scheduler : ['Scheduler.set_new_location → 2024-10-09 00:02:00+00:00'] (1) Dealers : DATA-DUMP-STATUS, F-DPU (2)
| 1 | The scheduler takes care of setting the correct location for the next day. This entry shows the function that will be called at a given date/time. |
| 2 | The dealers are the processes that are registered to the data dumper. |
For developers who run their own core services on their development machine, the data_dump process is started and stopped together with all other core services using the invoke start-core-egse and invoke stop-core-services commands.
5.5. The Process Manager
The job of the process manager is to keep track and monitor the execution of running processes during the Camera Tests.
There are known processes that should be running all the time, i.e. the configuration manager, and the Storage Manager. Then, there are device control servers that are dependent on the Site and the Setup at that site. The process manager needs to know which device control servers are available and how to contact them. That information is available in the configuration manager. We need to decide how the interface between the PM and the CM looks like and what information is exchanged in which format.
5.6. The Synoptics Manager
Synoptics = in a form of a summary or synopsis; taking or involving a comprehensive mental view. According to the Oxford Dictionary.
-
what is this?
-
Which parameters are Synoptic?
-
From the device to the Grafana screen, what is the data flow, where are the name changes, where are the calibrations….
In all involved test facilities, the EGSE is used to perform the same set of basic operations: monitoring temperatures, changing the intensity of the source and point it somewhere, acquiring images, etc. However, the devices that are used to perform these tasks are not everywhere the same (e.g. the OGSE with its lamp and filterwheels, the DAQs for temperature acquisition, etc.).
Each (device) control server has a dedicated CSV file in which the housekeeping information is stored and often the name of the parameters indicates the test facility at which they were acquired.
It is not inconvenient if user need to memorise the HK names for all test facilities, it also makes the test and analysis scripts more complex.
The Synoptics Manager stores this information in one centralised location (the synoptics file) with generic parameter names.
5.6.1. Synoptical Parameters
The housekeeping parameters that are stored in the synoptics are:
-
Calibrated temperatures, acquired by the FEE, TCS, and facility DAQs;
-
OGSE information (source intensity, measured power, whether the lamp and/or the laser are on);
-
Source position, both actual and commanded, as field angles (θ,φ).
5.7. The Telemetry (TM) Dictionary
The tm-dicionary.csv file (further referred to as the "telemetry ™ dictionary") provides an overview of all housekeeping (HK) and metrics parameters in the EGSE system. It is used:
-
By the
get_housekeepingfunction (inegse.hk) to know in which file the values of the requested HK parameter should be looked for; -
To create a translation table to convert — in the
get_housekeepingfunction of the device protocols — the original names from the device itself to the EGSE-conform name (see further); -
For the HK that should be included in the synoptics: to create a translation table to convert the original device-specific (but EGSE-conform) names to the corresponding synoptical name in the Synoptics Manager (in
egse.synoptics).
5.7.1. The File’s Content
For each device we need to add all HK parameters to the TM dictionary. For each of these parameters you need to add one line with the following information (in the designated columns):
| Column name | Expected content |
|---|---|
TM source |
Arbitrary (but clear) name for the device. Ideally this name is short but clear enough for outsiders to understand what the device/process is for. |
Storage mnemonic |
Storage mnemonic of the device. This will show up in the filename of the device HK file and can be found in the settings file ( |
CAM EGSE mnemonic |
EGSE-conform parameter name (see next Sect.) for the parameter. Note that the same name should be used for the HK parameter and the corresponding metrics. |
Original name in EGSE |
In the |
Name of corresponding timestamp |
In the device HK files, one of the columns holds the timestamp for the considered HK parameter. The name of that timestamp column should go in this column of the TM dictionary. |
Origin of synoptics at CSL |
Should only be filled for the entries in the TM dictionary for the Synoptics Manager. This is the original EGSE-conform name of the synoptical parameter in the CSL-specific HK file comprising this HK parameter. Leave empty for all other devices! |
Origin of synoptics at SRON |
Should only be filled for the entries in the TM dictionary for the Synoptics Manager. This is the original EGSE-conform name of the synoptical parameter in the SRON-specific HK file comprising this HK parameter. Leave empty for all other devices! |
Origin of synoptics at IAS |
Should only be filled for the entries in the TM dictionary for the Synoptics Manager. This is the original EGSE-conform name of the synoptical parameter in the IAS-specific HK file comprising this HK parameter. Leave empty for all other devices! |
Origin of synoptics at INTA |
Should only be filled for the entries in the TM dictionary for the Synoptics Manager. This is the original EGSE-conform name of the synoptical parameter in the INTA-specific HK file comprising this HK parameter. Leave empty for all other devices! |
Description |
Short description of what the parameter represents. |
MON screen |
Name of the Grafana dashboard in which the parameter can be inspected. |
unit cal1 |
Unit in which the parameter is expressed. Try to be consistent in the use of the names (e.g. Volts, Ampère, Seconds, Degrees, DegCelsius, etc.). |
offset b cal1 |
For raw parameters that can be calibrated with a linear relationship, this column holds the offset |
slope a cal1 |
For raw parameters that can be calibrated with a linear relationship, this column holds the slope |
calibration function |
Not used at the moment. Can be left emtpy. |
MAX nonops |
Maximum non-operational value. Should be expressed in the same unit as the parameter itself. |
MIN nonops |
Minimum non-operational value. Should be expressed in the same unit as the parameter itself. |
MAX ops |
Maximum operational value. Should be expressed in the same unit as the parameter itself. |
MIN ops |
Minimum operational value. Should be expressed in the same unit as the parameter itself. |
Comment |
Any additional comment about the parameter that is interesting enough to be mentioned but not interesting enough for it to be included in the description of the parameter. |
Since the TM dictionary grows longer and longer, the included devices/processes are ordered as follows (so it is easier to find back the telemetry parameters that apply to your TH):
-
Devices/processes that all test houses have in common: AEU, N-FEE, TCS, Synoptics Manager, etc.
-
Devices that are CSL-specific;
-
Devices that are SRON-specific;
-
Devices that are IAS-specific;
-
Devices that are INTA-specific.
5.7.2. EGSE-Conform Parameter Names
The correct (i.e. EGSE-conform) naming of the telemetry should be taken care of in the get_housekeeping method of the device protocols.
Common Parameters
A limited set of devices/processes is shared by (almost) all test houses. Their telemetry should have the following prefix:
| Device/process | Prefix |
|---|---|
Configuration Manager |
CM_ |
AEU (Ancillary Electrical Unit) |
GAEU_ |
N-FEE (Normal Front-End Electronics) |
NFEE_ |
TCS (Thermal Control System) |
GTCS_ |
FOV (source position) |
FOV_ |
Synoptics Manager |
GSYN_ |
TH-Specific Parameters
Some devices are used in only one or two test houses. Their telemetry should have TH-specific prefix:
| TH | Prefix |
|---|---|
CSL |
GCSL_ |
CSL1 |
GCSL1_ |
CSL2 |
GCSL2_ |
SRON |
GSRON_ |
IAS |
GIAS_ |
INTA |
GINTA_ |
5.7.3. Synoptics
The Synoptics Manager groups a pre-defined set of HK values in a single file. It’s not the original EGSE-conform names that are use in the synoptics, but names with the prefix GSYN_. The following information is comprised in the synoptics:
-
Acquired by common devices/processes:
-
Calibrated temperatures from the N-FEE;
-
Calibrated temperatures from the TCS;
-
Source position (commanded + actual).
-
Acquired by TH-specific devices:
-
Calibrated temperatures from the TH DAQs;
-
Information about the OGSE (intensity, lamp and laser status, shutter status, measured power).
For the first type of telemetry parameters, their original EGSE-conform name should be put into the column CAM EGSE mnemonic, as they are not TH-specific.
The second type of telemetry parameters is measured with TH-specific devices. The original TH-specific EGSE-conform name should go in the column Origin of synoptics at ....
5.7.4. Translation Tables
The translation tables that were mentioned in the introduction, can be created by the read_conversion_dict function in egse.hk. It takes the following input parameters:
-
storage_mnemonic: Storage mnemonic of the device/process generating the HK; -
use_site: Boolean indicating whether you want the translation table for the TH-specific telemetry rather than the common telemetry (Falseby default).
To apply the actual translation, you can use the convert_hk_names function from egse.hk, which takes the following input parameters:
-
original_hk: HK dictionary with the original names; -
conversion_dict: Conversion table you got as output from theread_conversion_dictfunction.
5.7.5. Sending HK to Synoptics
When you want to include HK of your devices, you need to take the following actions:
-
Make sure that the TM dictionary is complete (as described above);
-
In the device protocol:
-
At initialisation: establish a connection with the Synoptics Manager:
self.synoptics = SynopticsManagerProxy() -
In
get_housekeeping(both take the dictionary with HK as input):-
For TH-specific HK:
self.synoptics.store_th_synoptics(hk_for_synoptics); -
For common HK:
self.synoptics.store_common_synoptics(hk_for_synoptics).
-
-
Please, do not introduce new synoptics without further discussion!
6. The Commanding Concept
-
Proxy – Protocol – Controller
-
Control Servers
-
YAML command files
-
Dynamic commanding
6.1. The Control Server
TODO:
-
Explain what the CS does during startup and what happens when this fails.
-
description of the
control.pymodule
6.1.1. Create multiple control servers for identical devices
This section describes what you can do when you have identical devices, such as two LakeShore Temperature Controllers or multiple power supplies, and need to use them in the same project at the same site. While the control servers are configured in the Settings YAML file with, among other things, IP address and port numbers, they still need to be addressed in the Setup for configuring your equipment at a certain time and location. Specifically, you will need to create the proper Proxy class to communicate with your control server.
The specificity of the equipment used in your lab is defined in the Setup, and from the Setup, you will usually create the Controller or Proxy objects to access and control your equipment. This can be done in two different ways, which are explained in the next two sections.
Directly define the device controller class
In the Setup, you will define your devices as in the excerpt below. This will create a PunaProxy object whenever you request the device from the Setup.
gse:
hexapod:
device: class//egse.hexapod.symetrie.PunaProxySome devices contain more than one controller and need several control servers to manage that device. An example of this type is the AEU Test EGSE. This device contains six power supply units and two analog wave generators. When requesting a Proxy object to access the device, say PSU 2, the PSU identifier (the number '2' in this case) needs to be passed into the __init__() method of the Proxy class. To accomplish this, the Setup for this device contains an additional device argument:
gse:
aeu:
psu2:
device: class//egse.aeu.aeu.PSUProxy
device_args: [2]All the values that are given in the list for the device_args are passed as positional arguments to the __init__() method of the PSUProxy class. When requesting the device from the Setup, you will get a PSUProxy object. The super class was however instantiated with the port number that was defined for PSU 2 in the settings file.
>>> psu = setup.gse.aeu.psu2.device
>>> psu
<egse.aeu.aeu.PSUProxy object at 0x7f83dafc2460>
>>> psu.name
'PSU2'
>>> psu.get_endpoint()
'tcp://localhost:30010'Use a factory to create a device
In the Setup you can, instead of a class// definition, use a factory// definition. A Factory is a class with a specific interface to create the class object that you intended based on a number of arguments that are also specified in the Setup. Let’s first look at an example for the PUNA Hexapod. The following excerpt from a Setup defines the hexapod device as a ControllerFactory. There are also two device arguments defined, a device name and an idenditier.
gse:
hexapod:
device: factory//egse.hexapod.symetrie.ControllerFactory
device_args:
device_name: PUNA Hexapod
device_id: 1ASo, what happens when you access this device from the Setup. Let’s look at the following code snippet from your Python REPL. The Setup has been loaded already in the setup variable. To access the device, use the dot (.) notation.
>>> puna = setup.gse.hexapod.device
>>> puna
<egse.hexapod.symetrie.puna.PunaController object at 0x7f83e039ba60>
>>> setup.gse.hexapod.device_args.device_id = "1B"
>>> puna = setup.gse.hexapod.device
>>> puna
<egse.hexapod.symetrie.punaplus.PunaPlusController object at 0x7f83dab8ed00>When we –with the given Setup– request the hexapod device, we get a PunaController object as you can see on line 3,
when we change the device_id to '1B' and request the hexapod device, we get the PunaPlusController object (line 7). Changing the device_id resulted in a different class created by the Factroy. Any Factory class that is used this way in a Setup shall implement the create(..) method which is defined by the DeviceFactoryInterface class. Our ControllerFactory for the hexapod inherits from this interface and implements the method.
class DeviceFactoryInterface:
def create(self, **kwargs):
...
class ControllerFactory(DeviceFactoryInterface):
"""
A factory class that will create the Controller that matches the given device name
and identifier.
The device name is matched against the string 'puna' or 'zonda'. If the device name
doesn't contain one of these names, a ValueError will be raised. If the device_name
matches against 'puna', the additional `device_id` argument shall also be specified.
"""
def create(self, device_name: str, *, device_id: str = None, **_ignored):
if "puna" in device_name.lower():
from egse.hexapod.symetrie.puna import PunaController
from egse.hexapod.symetrie.punaplus import PunaPlusController
if not device_id.startswith("H_"):
device_id = f"H_{device_id}"
hostname = PUNA_SETTINGS[device_id]["HOSTNAME"]
port = PUNA_SETTINGS[device_id]["PORT"]
controller_type = PUNA_SETTINGS[device_id]["TYPE"]
if controller_type == "ALPHA":
return PunaController(hostname=hostname, port=port)
elif controller_type == "ALPHA_PLUS":
return PunaPlusController(hostname=hostname, port=port)
else:
raise ValueError(
f"Unknown controller_type ({controller_type}) for {device_name} "
f"– {device_id}"
)
elif "zonda" in device_name.lower():
from egse.hexapod.symetrie.zonda import ZondaController
return ZondaController()
else:
raise ValueError(f"Unknown device name: {device_name}")The create(..) method returns a device controller object for either the PUNA Alhpa or Alpha+ Controller, or for the ZONDA Controller. Each of these represent a Symétrie hexapod. The decision for which type of controller to return is first based on the device name, then on settings that depend on the device identifier. Both of these parameters are specified in the Setup (see above) and passed into the create() method of the factory class at the time the user requests the device from the setup.
The TYPE, HOSTNAME, and PORT are loaded from the PUNA_SETTINGS dictionary. These settings are device specific and are defined in the local setting for your site. The PUNA_SETTINGS is a dictionary that represents part of the overall Settings. The factory class uses these device configuration settings to decide which controller object shall be instantiated and what the parameters for the creation shall be.
└── PMAC Controller
├── H_1A
│ ├── TYPE: ALPHA
│ ├── HOSTNAME: XXX.XXX.XXX.X1A
│ └── PORT: 1025
└── H_1B
├── TYPE: ALPHA_PLUS
├── HOSTNAME: XXX.XXX.XXX.X1B
└── PORT: 23
You might think that it would be simpler to specify the device configuration settings also in the Setup and pass all this information to the create method when requesting the device from the Setup. However, this would undermine the specific difference between Settings and Setup and also would invalidate the direct creation of the controller object without the use of a factory class.
6.2. The Proxy Class
The Proxy class automatically tries to connect to its control server. When the control server is up and running, the Proxy loads the device commands from the control server. When the control server is not running, a warning is issued, and the device commands are not loaded. If you then try to call one of the device methods, you will get a NotImplementedError. The ZeroMQ connection initiated by the Proxy will just sit there until the control server comes up, so you can fix the problem with the control server and call the load_commands() method on the Proxy again to load the commands.
6.3. The Protocol Class
The DPU Protocol starts a thread called DPU Processor Thread. This thread is a loop that continuously reads packets from the FEE and writes RMAP commands when there is a command put on the queue. When the control server receives a quit command, this thread also needs to be terminated gracefully since it has a connection and registration with the Storage manager. Therefore, the Protocol class has a quit() method which is called by the control server when it is terminated. The DPU Protocol class implements this quit() method to notify the DPU Processor Thread. Other Protocol implementations usually don’t implement the quit() method.
Another example of a control server that starts a sub-process through its Protocol class in the TCS control server. The control server start the TCS Telemetry process to handle reading housekeeping from the TCS EGSE using a separate port [6667 by default].
6.4. Services
The control servers are the single point access to your equipment and devices. Commanding the device is handled by the Protocol and Controller classes on the server side and by the Proxy class on the client side. In addition to commanding your devices, you would also like to have some control on the behaviour of your device control servers. That is where the Service slass comes into play. The Services provide common commands that act on the control server instead of on the device. These commands are send through a Service Proxy that you can request for each of the control servers. Below is a code snippet asking for the service proxy of the hexapod PUNA and requesting the status of the control server process.
>>> from egse.hexapod.symetrie.puna import PunaProxy
>>> with PunaProxy() as puna, puna.get_service_proxy() as srv:
... print(srv.get_process_status())
{
'timestamp': '2023-03-29T08:00:31.708+0000',
'delay': 1000,
'PID': 39242,
'Up': 486.7373969554901,
'UUID': UUID('a74c0f52-ce06-11ed-a5d1-acde48001122'),
'RSS': 115720192,
'USS': 98033664,
'CPU User': 10.516171776,
'CPU System': 3.300619776,
'CPU count': 6,
'CPU%': 2.9
}
Status information for the control servers is also sent out on the monitoring port, so if you need to monitor the process status, its better to subscribe to the monitoring protocol.
There are two commands that you can use to change the frequency by which the control server is sending out information, one is for changing the housekeeping frequency, one is for changing the monitoring frequency.
set_hk_frequency(freq: float) -> float
This function sets the housekeeping frequency (in Hz) to the given freq value. This is only approximate since the frequency is converted into a delay time and the actual execution of the get_housekeeping() function is subject to the load on the server and the overhead of the timing. What will happen is that the delay time that will be applied is never shorter than the average execution time of the get_housekeeping() method increased with a 200ms overhead to allow the control server to respond to other commands.
set_monitoring_frequency(freq: float) -> float
This function works similar to the set_hk_frequency() but sets the delay time on the get_status() function of the device protocol.
When you want to optimize these frequencies, make sure you have an idea of the execution time of either function. If for instance the get_status() function takes 500ms to complete, it will be impossible to request a monitoring update frequency of 2Hz.
6.5. Response, Failure, Success
The control.py module defines a number of classes that can be used to send a response on a device command to the client. Responses are handle by the Protocol class in the handle_device_method() method.
The main reason why these classes are provided is because Exceptions that happen in the server process should somehow propagate to the client process. A Response object can contain a return value if the command was executed successfully, or it can contain an Exception object when the device command has failed. If the command has failed or not can be checked by the client with the successful() method.
The Response class has three sub-classes, Success, Failure, and Message. A Success object is returned by the server process with the actual response in the property return_code. In the case of an Exception, the server process logs the error message and packs the Exception object in a Failure object.
6.6. Dynamic Commanding
Two of the requirements that were formulated when we started the analysis and design of the CGSE was that (1) it shouldn’t be too difficult to implement device controllers and (2) the definition of the commands shall be done at one place only. So we started out with a design where the commands were defined in a YAML file (called the command yaml file) and the code would use this information to build the API for the device. That would make it —from the device developer point of view— rather easy to create the commanding interface for a new device. Unfortunately, the implementation was not that easy or straightforward. We are working in a client-server or even microservices environment which means the device commanding should be available on both the server side (what we call the Controller) and on the client side (what we call the Proxy).
Both the Controller and the Proxy will have to implement the same interface, but we didn’t want to bother the developer with having to implement the interface twice. The Proxy (client) side should be easy, because it doesn’t need any processing or device control, it only needs to forward the command and its arguments to the server to be executed and then wait for the response. On the server it is slightly more complicated since there we have to interact with a device that can be connected by Ethernet, USB, serial,… with many different commanding protocols.
We have currently two designs and implementations that handle dynamic commanding. The first implementation we came up with is the @dynamic_interface which is a decorator that is used on the methods in the device interface class. How this works is explained in the section below on Section 6.6.1. The latest implementation is the @dynamic_command which also decorates the interface methods, but does a lot more work with respect to command string generation and response processing. How this work is explained in Section 6.6.2. We have also written up a section on the transition from the old implementation into the new dynamic command implementation. See Section 6.6.3.
6.6.1. The Dynamic Interface Decorator
A @dynamic_interface decorator adds a private static variable to a function or method. The variable name that is attributed is __dynamic_interface and it is used as a marker on the function.
The static variable is used by the Proxy class to check if a method is meant to be overridden dynamically. The idea behind this is to loosen the contract of an abstract base class (ABC) into an interface. For an ABC, the abstract methods must be implemented at construction/initialization. This is not possible for the Proxy subclasses as they load their commands (i.e. methods) from the control server, and the method will be added to the Proxy interface after loading. Nevertheless, we like the interface already defined for auto-completion during development or interactive use.
When a Proxy subclass that implements an interface with methods decorated by the @dynamic_interface does overwrite one or more of the decorated methods statically, these methods will not be dynamically overwritten when loading the interface from the control server. A warning will be logged instead.
The methods of the Proxy sub-class are added by the base class method load_commands(). This method asks the control server to send all device command definitions. The control server replies with a dictionary of user-defined methods and their names as keys. The commands are attributed to the Proxy class as methods with the key as their method names, unless the attribute name already exists in the Proxy and is not decorated as a dynamic interface. The following code snippet demonstrates how the command methods are dynamic added/attributed to the Proxy class.
def _add_commands(self):
for key in self._commands:
if hasattr(self, key):
attribute = getattr(self, key)
if (
isinstance(attribute, types.MethodType) and
not hasattr(attribute, "__dynamic_interface")
):
continue
command = self._commands[key]
new_method = MethodType(command.client_call, self)
new_method = set_docstring(new_method, command)
setattr(self, key, new_method)The command from the dictionary is not just added as a new attribute of course (that would be too easy 😀). Instead, each command is defined as an instance of a client-server command class (ClientServerCommand). The ClientServerCommand has two methods client_call() and server_call() and —you guessed it— all the dynamically attached methods are the client_call() method for that command, but carrying the name of the command, i.e. the key in the dictionary.
The command.client_call is a function, i.e. an unbound class method. We are now trying to associate this function with the class instance (self) of the Proxy sub-class. We need to create a method that is bound to the class instance. Think of it as binding the class instance to the first argument of the function (the self argument).
The MethodType() returns a new callable object that holds both the function and the instance, and if you call this object, its first argument is automatically bound to the self argument.
The setattr(self, key, new_method) can not be replaced by a plain assignment because the name of the method is a string and we can not do something like self.key = new_method because the method name would be key.
So, during the creation of the Proxy object, the command list is requested from the control server, and when the command is not already an attribute of the Proxy sub-class, its client_call() method is connected as a new method to the Proxy sub-class.
The ClientServerCommand class is defined in the module egse.command and the client_call() method does something like in the code snippet below. The arguments that are passed into the function are first validated. This validation is done against the input given in the command yaml file. Then a command execution object is created which is sent to the control server. The response from the server is returned.
def client_call(self, other, *args, **kwargs):
try:
self.validate_arguments(*args, **kwargs)
except CommandError as e_ce:
logger.error(str(e_ce))
return None
ce = CommandExecution(self, *args, **kwargs)
return other.send(ce)At the control server, the command execution is received by the Protocol class and the command and the given arguments are extracted. The Protocol then calls the server_call() method of the command with the arguments. The (simplified) code snippet below illustrates what happens in the execute() method of the Protocol class at the server. The self variable is the instance of the device protocol class.
def execute(self):
...
ce = self.receive()
cmd = ce.get_cmd()
args = ce.get_args()
kwargs = ce.get_kwargs()
...
cmd.server_call(self, *args, **kwargs)The server_call() now calls the method from the Controller class that was associated with the ClientServerCommand while parsing and processing the command yaml file. That method is called with the arguments passed into the command execution.
-
[] make a graph illustrating the round-trip of the commanding chain.
6.6.2. The Dynamic Command Decorator
One of the problems of the dynamic interface decorator is that during construction of the Proxy class, the control server must be contacted to request the list of commands, when this fails and the control server is not available, the Proxy is not functional. You will first get a warning log message of the following type:
<Device>Proxy could not connect to its control server at tcp://localhost:6700. No commands have been loaded.When you then try to execute a command, e.g. puna_proxy.get_speed(), it will result in a NotImplementedError. The reason is that the commands have not been loaded from the control server and therefore the default interface method is executed resulting in this error.
Mainly for this reason we have enhanced the dynamic commanding protocol with the @dynamic_command decorator. This decorator behaves differently on the client side (the Proxy) and the server side (the Controller). There is no need anymore to load the available commands from the control server, so, proxies for devices can be started when the control server is not yet running and will gracefully (re-)connect to the device when the control server becomes available.
- NOTE
-
add more description of what the decorator is, what happens behind the scenes, how it is perceived on the client and on the server side etc…
So, since the @dynamic_command is the successor of the @dynamic_interface, how do we refactor our code for this new commanding scheme. That will be explained in the next section.
6.6.3. Update your code to use the @dynamic_command decorator
-
Each method in the interface needs to be changed from a
@dynamic_interfaceto a@dynamic_command. Remember the@dynamic_interfaceonly marked the method with the__dynamic_interfaceattribute. The@dynamic_commanddefines the type of command, how the command string is contructed and how the response needs to be decoded. As an example, consider theget_current_position()method in theHuberSMC9300Interfaceclass.
@dynamic_interface
def get_current_position(self, axis) -> float:
"""
Returns the current position for this axis as a float.
"""
raise NotImplementedErrorThe method takes an argument axis and returns the current position as a float. The implementation is found in the HuberSMC9300Controller class.
def get_current_position(self, axis) -> float:
cmd_string = cmd_q_pos.get_cmd_string(axis)
retStr = self.huber.get_response(cmd_string)
# The response will look like '<axis>:<retPos>;'
# where <axis> is the axis number and <retPos> is the current position
# as a float
retPos = float(retStr[2:-1])
return retPosIn the new scheme, the method in the interface class will look like below and the method in the controller class will be removed.
@dynamic_command(cmd_type="query", cmd_string="?p${axis}",
process_cmd_string=process_cmd_string,
process_response=decode_axis_float)
def get_current_position(self, axis: int) -> float:
"""
Returns the current position for this axis as a float.
"""
raise NotImplementedErrorThe command is a query command and therefore expects a response from the device. The command string is given in the form of a string template where 'axis' is replaced by the value of the axis argument of the method. The cmd_string will become "?p1" when axis=1. The process_cmd_string is a function that will prepare the command string for sending to the device. In the case of the HUBER stages, it appends \r\n before sending.
The decode_axis_float is a function used to decode the response from the device. It’s a function that can be used to process all responses in the form of <axis>:<float>;.
def decode_axis_float(response: bytes) -> float:
"""
Decodes the response of type '<axis>:<float>;' and strips off the newline.
"""
response = response.decode().rstrip()
return float(response[2:-1])So, we removed the method from the Controller class and converted the Interface method from a @dynamic_interface to a @dynamic_command.
The Controller class still inherits from the Interface class, but additionally it now also needs to inherit from the DynamicCommandMixin class which is defined in the egse.mixin module.
class HuberSMC9300Controller(HuberSMC9300Interface, DynamicCommandMixin):
...-
The Proxy class needs to inherit from
DynamicProxyinstead of `Proxy:
class HuberSMC9300Proxy(DynamicProxy, HuberSMC9300Interface):
...-
Finally, remove all device command definitions from the device YAML file, in our case
smc9300.yaml.
Thus far we have touch on the following arguments that can be used with @dynamic_command.
-
cmd_typecan be one of the following 'read', 'write', 'transaction', and 'query'. This is the only required argument for the decorator. -
cmd_stringdefines the formatting of the eventual command string that will be passed to the transport functions. Thecmd_stringis a template string that contains$-based substitutions for the function arguments. When you specify theuse_format=Truekeyword, thecmd_stringwill be formatted using the format() function instead of the template substitution. The format option is less secure, but provides the functionality to format the arguments.A template string looks like:
cmd_string="CREATE:SENS:TEMP ${name} ${type} default=${default}"The same
cmd_stringas a format option:cmd_string="CREATE:SENS:TEMP {name} {type} default={default:0.4f}" use_format=True -
process_responseis a pure function[2] to process the response from the device before it is returned. This function shall take at least one keyword argumentresponse=which is the response from the device as a byte array. The value that is returned by the function is eventually also the response of the command that was executed. This return value is device implementation specific and part of the interface definition. -
process_cmd_stringis a pure function to process the given command string to make it ready for sending to the device. This function is called after the arguments to the command have been filled into the template string given bycmd_string. The function shall take a string as the only positional argument and return a string that will be sent to the device.
Then, there are these additional arguments that can be used with @dynamic_command to tune the command string and pre- and post-processing.
-
use_formatdefines if thecmd_strshall be formatted as a template string or with theformat()method. -
process_kwargsis a function that processes the keyword arguments and returns a string representation of those arguments. By default, keyword arguments are expanded in a string containingkey=valuepairs separated by spaces. This function is used when the arguments are given as**kwargsto the function definition. -
pre_cmdspecifies a function that will be executed before the processed command string is sent to the device. -
post_cmdspecifies a function that will be executed after the command is executed, i.e. sent to the device and potentially retrieved a response.
The pre_cmd and post_cmd keywords specify a callable/function to be executed before and/or after the actual command was executed. These functions are called with specific keyword arguments that allow additional device interaction and response processing. The pre_cmd function is called with the keyword argument transport= which passes the device transport. This allows the function to interact with the device again through the methods defined by the DeviceTransport interface. Additionally, the name of the called function (function_name), the processed command string (cmd_string) and the original positional (args) and keyword arguments (kwargs) are passed into the pre_cmd function. These additional arguments should not be changed, but can be used by the function for processing, logging, etc. The pre_cmd function must not return anything.
The post_cmd function is called with the keyword arguments transport= and response=. The response argument contains the response from the command that was previously sent to the device. The post_cmd function can use this response to parse its content and act against this content, although possible, it is usually not a good idea to alter the content of the response argument. The post_cmd function shall return (i.e. pass through) the response or return it’s own information e.g. a status that was retrieved from the device with an additional command sent over transport.
We now have walked through all the steps to upgrade your device commanding. The next thing to do is testing!
7. Notifications for Control Servers
This section explains how notifications for control servers are designed and implemented with an Event Listeners pattern. We will talk about events between two processes, two control servers. One control server will send out notifications for an event and is therefore called the notifying control server or the Producer, the other control server is listening for events and is therefore called the listening control server, or the Consumer.
The basic requirements we have for the event notification are:
-
Any control server shall be able to accept a registration for a notification of an event.
-
It shall be possible to unregister from receiving events.
-
The event generator (producer) shall not wait for a reply from the listener.
-
The Listener shall handle events as soon as possible.
The following terms will be used throughout this chapter. In order to try to avoid confusion, we will briefly explain those in the context of the CGSE.
| Event |
The event is the object that carries the information about a change that needs to be reported to the listeners. |
| Listener |
The process that registers to a control server for an event notification is called a listener or consumer, i.e. it listens for one or more specific events that are sent out by another control server process. |
| Event Generator |
The control server process that sends out notifications to its listeners. Sometimes its called a producer. This control server holds registrations for all listeners that need to be notified of an event. |
In the case of the CGSE, a control server can act both as the event generator and the listener. Not that the control server will send events to itself, but it will send events to other control servers. Therefore, the implementation will include both sides of the event listener pattern, i.e. producer and consumer. The pattern will be implemented with ZeroMQ messaging. This is different from the usual implementation of this pattern where a producer object calls a method on a consumer object. In our case, the event generator process, will send a ZeroMQ message, containing the event object, to the listener process.
7.1. The Event
An Event is an object that contains all information needed by the listeners in order to process the event notification.
An Event is defined by an event identifier and an event type. Currently, the only event identified is the New Setup event notification with event_id: EVENT_ID.SETUP and event_type: "new_setup". An Event also needs a context which contains information that is needed by the listener in order to handle the event. The context contains event specific information, e.g. in the case of a new Setup, the context also contains the setup identifier (setup_id).
The control server that wants to be notified of an event needs to implement the EventInterface in the Proxy and in the Controller. This interface currently contains only one method, ie. handle_event(event) which takes the event object as its only argument.
7.2. The Listener
Listeners are registered and unregistered through the services interface of the control server. That means the developer of a control server that needs to listen to events doesn’t need to implement the registration functions, only the handling of the events must be implemented.
When a listener is registered, a name and a proxy shall be provided. The name is used as an identifier for the listener, the proxy is the Proxy class for the listening process. The proxy will be used by the producer to notify the listener/consumer.
When registering, another proxy shall be provided, which is the producers proxy, i.e. the proxy for the control server to which the listener wants to register. So, for example, if the storage manager wants to listen to events on new Setups from the configuration manager, that proxy shall be a ConfigurationManagerProxy. The following code snippet should make this clear:
self.register_as_listener(
proxy=ConfigurationManagerProxy,
listener={'name': 'Storage CS', 'proxy': StorageProxy, 'event_id': EVENT_ID.SETUP}
)Registrations are issued from the ControlServer and handled by the ServiceProtocol. The registration is executed in a separate thread and retried 5 times with a 10s wait time in between.
Event notifications are handled by executing the handle_event() method on the consumer Proxy. The handle_event command is defined by the EventInterface which is a base class for the Controller and the Proxy. Both the Controller class and the Proxy class need to inherit from the EventInterface.
class EventInterface:
@dynamic_interface
def handle_event(self, event: Event):
...In this case, we will also need to provide an entry in the command YAML file:
handle_event:
description: Notification of an event
cmd: '{event}'
7.3. The Event Generator
The control server that generates the events keeps a list of registered consumers/listeners. The registration of these listeners is handled by the service protocol. Event notifications are sent out from the ControlServer class, but they usually occur in the Controller class. The Controller therefore shall keep a reference to its control server. When the event is detected, the Controller will use the notify_listeners() method of the ControlServer. This latter method expects an event identifier and the event context. The example code snippet below sends out a new setup loaded notification to all registered listeners.
self._control_server.notify_listeners(
EVENT_ID.SETUP,
{'event_type': 'new_setup', 'setup_id': setup_id}
)The notify_listeners() method will execute the actual notification in a separate thread in order not to block the commanding event loop.
7.4. The Service Protocol
The registration, management, and notification of listeners in a control server is handled by the service protocol. That means all control servers automatically have this functionality available. There is only one method that needs to be implemented in the listening control server and that is the handling of the event. That is defined in the EventInterface which the Proxy and the Controller of the listening control server shall inherit and implement.
New commands in Service:
-
add_listener()– add a listener to the registration -
remove_listener()– remove a listener from the registration -
get_listener_names()– returns the names of the control servers that are registered as listener
New commands in ControlServer:
-
register_as_listener()— register this control server to a producer -
unregister_as_listener()— unregisters this control server -
notify_listeners()— send an event notification to all registered listeners -
get_listener_names()— return a list of names of registered listeners
7.5. Scheduled Tasks
The scheduled tasks are functions known in the control server sub-class which will be executed outside the context of commanding and monitoring. The reason we need these scheduled tasks is to handle actions that either take too long during the execution of a command, or when a command request is sent back to the same control server that the original command came from, e.g. request the current Setup. In that latter case we will get a deadlock because both control servers will be waiting for each others reply.
Scheduled tasks are executed from the ControlServers event loop (serve()) after the current command has been finished and the status and housekeeping has been published. Keep in mind that –at this point– the tasks should not take too much time or shall either run in a thread or run asynchronously.
Tasks can also be scheduled after a certain time, e.g. after 10s (approximately), or can be scheduled when a certain condition is true, e.g., when a service comes on-line. The after and when can be combined.
7.6. The Notification Process
This section explains what the natural flow is for notifications, starting at an event happening in a control server up to processing the event in the registered listener processes.
As an example we will use the event that a new Setup will be loaded in the configuration manager. This can happen when the configuration manager is requested to load a new Setup (load_setup()) or when a client submits a new Setup to the configuration manager (submit_setup()). The configuration manager will then send a notification of this event to its registered listeners. The listeners shall implement a command to accept such an event notification. By convention, this command is handle_event(event) (defined in the EventInterface). So, if you need to be notified about a new Setup, your control server needs to implement the handle_event command in its commanding interface. See further XXXXX
A control server that wants to listen to events needs to register first. This shall be done during startup, usually in the __init__() method of the listening control server. Registration requires a proxy for the notifying control server that will accept the registration, and a listener object (a dictionary) with information about the listener process.
self.register_as_listener(
proxy=ConfigurationManagerProxy,
listener={'name': 'Storage CS', 'proxy': StorageProxy, 'event_id': EVENT_ID.SETUP}
)The notifying control server will accept the registration and add the listener to its list of registrations.
When an event occurs at the notifying control server, an event notification will be sent out to all the registered listeners. This is done by the notify_listeners() method of the ControlServer.
The listening control server will receive the notification, execute or schedule a task to act on the event, and acknowledge the proper reception of the notification. This is done in the handle_event() method that needs to be implemented by the listening control server in its Controller class. The handling of the event shall be as fast as possible because the notifying control server will be waiting for an acknowledgment. Therefore, there are currently two options:
1. the task is executed in a thread,
2. the task is scheduled and will be executed from the event loop in the control server (serve()).
7.7. The Configuration Manager
- NOTE
-
This section should describe how notification is implemented in the configuration control server as a producer.
The controller now keeps track of the Setup that is currently active. This value changes when a different Setup is loaded (with load_setup()) or when a new Setup is submitted (with submit_setup()) to the configuration manager.
If you want to know which processes have registered to the configuration manager, the status info has been updated for this. The last line now shows the registered listeners:
$ cm_cs status Configuration manager: Status: active Site ID: CSL2 No observation running Setup loaded: 00053 Hostname: 192.168.68.76 Monitoring port: 6001 Commanding port: 6000 Service port: 6002 Listeners: Storage CS, Dummy CS
7.8. The Storage Manager
- NOTE
-
This section should describe how notification is implemented in the storage manager control server as a consumer.
The Storage Manager can now handle events about a new Setup loaded in the configurations manager and will register to the configuration manager during startup. The Storage Controller now keeps a record of the currently loaded Setup in its Controller.
Since a Setup can only be changed outside the context of an observation, the implementation is not too complicated. The controller has a new method load_setup(id) which is executed as a scheduled task after a notification is received. That task will fetch the Setup from the configuration manager (the reason why we needed scheduled tasks to avoid a deadlock at this point).
The status information from the Storage manager now also includes the ID of the loaded Setup. See second last line in the example output below.
Storage Manager: Status: active Hostname: 172.20.10.3 Monitoring port: 6101 Commanding port: 6100 Service port: 6102 Storage location: /Users/rik/data/CSL2 Loaded Setup: 00053 Registrations: ['obsid', 'CM', 'PM', 'SYN-HK', 'SYN', 'DUMMY-HK']
7.9. The Dummy Control Server
As an example… XXXXX
The Dummy module is updated to implement event notification and listener registration. The Dummy control server will register to the configuration manager at start up and will handle any event it receives by logging the event reception and execution. In the shutdown phase after_serve() the Dummy control server unregisters from the configuration control manager.
7.10. Adding event handling to a control server
This section will guide you through the process of implementing event handling into a control server. As an example we will update the Synoptic Manager CS to register to the configuration manager for new Setup events and handle those events in a scheduled task.
So, the summary of changes that we are going to implement is:
-
Add registration and de-registration to the Synoptic Manager CS
-
add registration to
__init__()method -
add de-registration to the
after_server()method
-
-
Implement the
EventInterfaceby means of thehandle_event()method-
implement a load_setup function for the controller class
-
schedule the task to load the Setup
-
The Synoptic Manager is started only after the configuration manager has started up and will therefore be initialised with the proper Setup. No need to add a one-time scheduled task for loading the Setup at startup.
7.10.1. Add registration and de-registration
Files:
-
egse.synoptics.syn_cs.py
7.10.2. Implement the event handling
Files:
-
egse.synoptics.__init__.py
XXXXX: shall we also add an example of an event handling task that takes too long to process and can therefore not be a scheduled task unless it is running in a thread?
8. The Setup
| The content of this section could be split between the developer manual and the user manual. Usage can go into the User Manual, the Developer Manual will explain how the Setup is coded and how it is used in code. |
The Setup is the name we give to the set of configuration items that make up your test environment. A configuration item is e.g. a device like a temperature controller, a mechanism like a Hexapod, a camera (which is the SUT: System Under Test). The Setup groups all these items in one configuration.[3]
In section Chapter 9 we explain what goes into Settings, how to use them and where these Settings are defined. This section, however, explains what a Setup is, when and where it is used, how the different Setups are managed and how you can create a new Setup.
The difference between the Settings and a Setup might be confusing. Remember that Settings are static, while the Setup is dynamic:
-
Settings are for constants, IP addresses, port numbers, system definitions, equipment settings … Settings are more static and do not change often unless your system or network is reconfigured. Settings are also distributed with the software with the possibility to overwrite for local specific settings.
-
Setup contains configuration items, conversion coefficients and tables, identification and configuration of devices, everything that defines the configuration of the system, that can change from test to test and has influence on the data, HK, … A Setup changes frequently during the test campaign while e.g. calibration is improved. Setups are kept under configuration control in GitHub.
Part of the information in this section can overlap with the section on Configuration and Setups in the Commanding Manual, see RD-04.
8.1. What is the Setup?
Explain the Setup is a NavigableDict and what that means to the usage etc. See also further in this section, it’s partly explained.
This is explained further in …
|
The Setup is defined as a hierarchy of configuration items and their specific settings and definitions. All the hardware and software that make up your complete test setup will be described in the YAML file. As a quick example, the lines below define a typical setup for the Hexapod PUNA that is used at CSL:
Setup:
gse:
hexapod:
device_name: Symetrie Puna Hexapod
device: class//egse.hexapod.symetrie.puna.PunaProxy
ID: 172543
firmware: 3.14
time_request_granularity: 0.1The Setup is implemented as a YAML configuration file and loaded into a special Python dictionary. The dictionary is special because it allows you to navigate with a 'dot' notation in addition to keys. The following two lines are equivalent (assuming the Setup is loaded in the variable setup):
>>> setup.gse.hexapod.ID
172543
>>> setup["gse"]["hexapod"]["ID"]
172543Another advantage of this special dictionary is that some fields are interpreted and loaded for you. For example, the device field of the Hexapod starts with class// and provides the class name for the Hexapod device. When you access this field, the class will automatically be instantiate for you and you can start commanding or querying the device. The following example initiates a homing command on the Hexapod controller:
>>> setup.gse.hexapod.device.homing()When you want to know which configuration items are defined in the Setup at e.g. the gse level, use the keys() function:
>>> setup.gse.keys()
dict_keys(['hexapod', 'stages', 'thorlabs', 'shutter', 'ogse', 'filter_wheel'])When you want a full printout of the setup.gse, use the print function. This will print out the dictionary structure as loaded from the YAML file.
>>> print(setup.gse)8.2. What goes into the Setup?
The Setup will contain configuration information of your test equipment. This includes calibration and conversion information, identification, alignment information, etc. All items that can change from one environment to the next, or from one test to the next, should be fully described in the Setup.
The following list gives an idea of what is contained and managed by a Setup. This list is not comprehensive.
-
site: identification of the Site, e.g. CSL, IAS, INTA, SRON.
-
position: if you have different test setups, each of them should be identifiable, e.g. at CSL there are two positions with different setups.
-
gse: the ground support equipment like mechanisms, temperature controllers and sensors/heaters, optical equipment, shutter, hexapod, power meters, SpaceWire interface, TEB, etc.
-
camera: this is the System Under Test (SUT) and it has different sub-items like FEE, TOU, DPU software, model and type, all with their specific characteristics.
For all of these items the Setup shall hold enough information to uniquely identify the configuration item, but also to reproduce the state of that item, i.e. version numbers of firmware software, transformation matrices for alignment, conversion coefficients, calibration tables, etc.
8.3. How to use the Setup
As described above, the Setup is a special dictionary that contains all the configuration information of your test equipment. This information resides in several files maintained by the configuration control server. You can request a list of Setups that are available from the configuration manager with the list_setups() function. This is a convenience function that will print the list in your Python session.
>>> list_setups()The above command will contact the configuration control server and request the list of Setups. To load the current active Setup into your session, use the load_setup() method. This function takes one optional argument to load a specific Setup. Now you can work with this setup as explained above, accessing its content and navigate through the hierarchy with the 'dot' notation.
If you need to make a change to one of the configuration items in the Setup, you can just assign a new value to that field. Suppose we have upgraded the firmware of the PUNA Hexapod that is used in this setup, we can use the following commands to make that change:
>>> setup.gse.hexapod.Firmware = 3.1415The change then needs to be submitted to the configuration control server who will put it under configuration control, i.e. assign a new unique Setup identifier and save the entier Setup into a new YAML file.
>>> setup = submit_setup(setup, description="Updated firmware of PUNA Hexapod")8.4. How to create and manage Setups
Whenever you make a change to an item in the Setup, or you add a configuration item, a new Setup will be created with a new unique id as soon as you submit the Setup to the configuration manager.
The configuration control server has no insight or knowledge about the content of a Setup, so you can freely add new items when needed. The simplest way to start with a Setup and adapt it to your current test equipment environment, is to load a Setup that closely resembles your current environment, and only make the changes necessary for the new Setup, then submit the new Setup to the configuration control server.
If you need to start from scratch, create a new empty Setup or feed it with a dictionary that contains already some of the information for the Setup:
>>> from egse.setup import Setup
>>> setup = Setup({"gse": {"hexapod": {"ID": 42, "name": "PUNA"}}})
>>> print(setup)
gse:
hexapod:
ID: 42
name: PUNAIf you need to set the firmware version for the Hexapod controller.
>>> setup.gse.hexapod.firmware = "2020.07"
>>> print(setup)
gse:
hexapod:
ID: 42
name: PUNA
firmware: 2020.07This way it is easy to update and maintain your Setup. When ready, submit to the configuration control server as shown above.
If you want to save your Setup temporarily on your local system, use the to_yaml_file() method of Setup. This will save the Setup in your working directory.
>>> setup.to_yaml_file(filename="SETUP-42-FIXED.yaml")
The Setup is also available from the GlobalState, however, use this with care and only when there is no other means to get hold of the current Setup. The preferred way to make the current Setup available in a function is to pass a setup argument.
|
| Explain here how the user should submit a Setup from the client machine. That will send the Setup to the configuration manager and automatically push the new Setup to the GitHub repository provided the proper permissions are in place, i.e. a deploy key with write access. Where shall this be described? |
9. The Settings Class
-
The
settings.pymodule… -
The
settings.yamlfile is located in theegsemodule. -
The local settings ….
-
reloading settings is currently not possible
The Settings contain all static information needed to configure your system and environment. That is first of all the version and release numbers of the CGSE, and the site identifier and other information about the site. The Settings also contain all the IP addresses and port number for all the known devices, together with other static information like the device name, default settings for the device like speed, timeout, delay time, firmware version, etc. We will go into more details about the content later, let’s now first look at the format and usage of the Settings.
The Settings are maintained in a YAML file which is located in the egse module. The default Settings file is named settings.yaml and we call them Global Settings. You can for your project or test house also define Local Settings with higher precedence that will overwrite the global settings when loaded. The location of the local settings YAML file is defined by the environment variable $PLATO_LOCAL_SETTINGS and is usually defined as follows:
$ export PLATO_LOCAL_SETTINGS=/cgse/local_settings.yaml
In your code, the Settings are accessed by Settings class from the egse.settings Python module. This module defines the Settings class which is used to access all information in the Settings. You can load the Settings in your session with the following command:
from egse.settings import Settings settings = Settings.load()
This will load the global settings first and then the local settings if the environment variable is defined. Remember that local settings will take precedence. You only need to define the settings that actually change for your local installation, respect the full hierarchy when specifying those settings. You are allowed to define new entries at any level in the Settings hierarchy.
In a terminal you can check your settings as follows:
$ python3 -m egse.settings AttributeDict ├── Common-EGSE │ ├── VERSION: 2022.3.0-rc.13+CGSE │ └── RELEASE: November 2022, 2022.3.0-rc.13+CGSE ├── SITE │ ├── ID: CSL1 │ ├── SSH_SERVER: localhost │ └── SSH_PORT: 22 ... Memoized locations: ['/cgse/lib/python/Common_EGSE-2022.3.0rc13+cgse-py3.8.egg/egse/settings.yaml', '/cgse/local_settings.yaml']
The memoized locations are the settings files that have been loaded and memorized. Once the application has started and the settings have been loaded, they can only be reloaded by explicitly forcing a reload as follows:
settings = Settings.load(force=True)
This does however not guarantee that the settings will propagate properly throughout the application or to client apps. Settings can be saved in local variables or class instances that have no knowledge of a settings reload.
Other things to document XXXXX:
-
IP addresses or HOSTNAMES in the global settings shall by default all be set to
localhost.
10. The GlobalState
-
What can we do with the
GlobalState? -
How to use the GlobalState in test scripts?
| This section needs to be updated! |
10.1. Singleton versus Shared State
From within several places deep in the code of the test scripts, we need access to a certain state of the system and act accordingly. The main state to access is the Setup which provides all configuration and calibration parameters of the test equipment and of the SUT.
Another use is the dry_run state which allows you to execute command sequences (test scripts) without actually sending instructions to the hardware, but just logging that the command would have been executed with its arguments. We could have gone with a singleton pattern, i.e. a class for which only one instance exists in your session, but a singleton is a difficult pattern to test and control. Another possible solution is to use a class for which all instances have a shared state. That means even if the class is instantiated multiple times, its state is the same for all those instances. This pattern is also known as the Borg pattern or the shared-state pattern.
An alternative to provide such functionality is to pass arguments with the required state into all levels until the level/function where the information is needed, even if the argument is never used in most of the intermediate levels.
The name GlobalState is maybe not such a good name as this class actually shares state between its instances, but this shared state is not global in the sense of a global variable. The objects can be instantiated from anywhere at anytime, which is what makes them globally available.
10.2. What is in the GlobalState?
The following sections describe the different states and function provided by the GlobalState. Remember the GlobalState is intended to be used within functions and methods of the test scripts in order to access global state information. That means the GlobalState needs to be initialised for some functions to work properly. Don’t use the GlobalState in Common-EGSE modules. If you need access to the Setup from the CGSE, explicitly request the Setup from the configuration manager using the get_setup() function.
10.2.1. The Setup
You can access the Setup from the GlobalState as follows:
from camtest import GlobalState setup = GlobalState.setup
The GlobalState requests the Setup from the configuration manager which keeps track of the currently active Setup. On system startup however, when the configuration manager is not running, the above code will return None. Fix your system startup and load a proper Setup into the configuration manager if this is the case.
You can load the Setup also with the function load_setup() and this will then automatically populate the GlobalState:
from egse.setup import load_setup setup = load_setup()
From the Setup you can access all devices that are known by the configuration manager, and you have access to configuration and calibration settings. The Setup is fully described in the API documentation of the class at egse.setup.
The Setup that comes with the GlobalState is loaded from the Configuration Manager. If you need to work with different Setups simultaneously, GlobalState is not the right place to be. In this case you should work directly with the Setup class. You can get any Setup with the get_setup() function without loading that Setup in the configuration manager.
from egse.setup import get_setup setup_67 = get_setup(67)
There is a subtle difference between the get_setup() and the load_setup() function. The get_setup() function retrieves the requested Setup from the configuration manager without replacing the currently active Setup in the configuration manager control server. The load_setup() returns the requested Setup and replaces the currently active Setup in the configuration manager.
|
Alternatively, you can load any Setup directly from a dictionary or a YAML file using the static methods from_dict(my_dict) or from_yaml_file(filename) of the Setup class.
There is a full section on the Setup, how to populate it, how it is managed and controlled and what it shall contain and what not. Check out the section on The Setup to get more details.
10.2.2. Performing a Dry Run
At some point we need to check the test scripts that we write in order to see if the proper commands will be executed with their intended arguments. But we don’t want the commands to be sent to the mechanisms or controllers. We want to do a dry run where the script is executed as normal, but no instructions are sent to any device.
10.2.3. Retrieve the Command Sequence
Whenever a building block is executed, a command sequence is generated and stored in the GlobalState. There are two functions that access this command sequence: (1) the execute() function will copy the command sequence into the test dataset, and (2) the generate_command_sequence() will return the command sequence as a list (TODO: this will probably get its own class eventually).
11. Data Strategy
-
where is the data stored
-
what is the folder structure
-
/data and /archive
-
rsync
-
data propagation
-
[ ]
12. Date, Time and Timestamps
This section explains how and where time is used in the CGSE code and in the data.
What goes in?
-
the format_datetime() function
-
timestamps in the CSV files
-
timestamps in the HDF5 files
-
timestamps in the FITS files
-
timestamps in the log files
-
timestamps in Grafana
-
UTC versus local time
-
time synchronisation → NTP or otherwise
12.1. Formatting the date and time
In the egse.system module we have provided a few functions to work with datetime in a consistent way. The most important is the format_datetime() function which is used for instance to create the timestamps for all CSV housekeeping data files.
>>> format_datetime() '2022-06-01T07:47:25.672+0000'
The format that is returned by default is "YYYY-mm-ddTHH:MM:SS.μs+0000" which means the time is expressed in UTC. The function has a few optional parameters that allows to tune the returned string. This should be used only for specific purposes, use the default always to generate a timestamp for your data.
If you need to parse the timestamp string returned by the format_datetime() function, use the following format string: "%Y-%m-%dT%H:%M:%S.%f%z". We might provide a parse_datetime() function in the future to standardize and simplify the parsing of datetime objects.
>>> datetime.strptime(format_datetime(), "%Y-%m-%dT%H:%M:%S.%f%z") datetime.datetime(2022, 6, 1, 8, 22, 3, 686000, tzinfo=datetime.timezone.utc)
If you need a specific date without time, the format_datetime() function takes a string argument that you can use to get the date of today, yesterday, tomorrow and the day before yesterday. This might be useful in scheduling tasks.
>>> format_datetime('yesterday)
'20220531'
>>> format_datetime('yesterday', fmt="%d/%m/%Y")
'31/05/2022'
Part III — Device Commanding
13. Device Control Servers
-
Mechanisms
-
Sensors
-
Heaters
-
Facility
13.1. The Device Interface Classes
-
Naming convention
-
SCPI
-
Where are device drivers configured?
-
Direct communication with devices
-
Device simulators
-
Device Interfaces
-
Description of the
device.pymodule
13.1.1. The Connection Interface
A connection interface defines the commands that are used to establish a connection, terminate a connection, and check if a connection has been established. We have two main connection interfaces: (1) a connection to a hardware device, e.g. a temperature controller or a filter wheel, and (2) a connection to a control server. A control server is the single point access to a hardware device.
Connection Interface for Devices
A Controller is a class that connects directly to the hardware. This can be through e.g. an Ethernet TCP socket or a USB interface or any other connection. The details of a connection are buried in low level device interface classes which use all kinds of different protocols. The Controller will use these low level device classes to control the connection, and then provide a uniform interface to connect and disconnect from the device to the user.
So, we defined a generic interface for working with device connections. The interface defines the following commands: connect, disconnect, and is_connected.
Use the connect() method to establish a connection to the hardware controller of the device.
Use the disconnect() method to terminate the connection to the hardware controller.
The previous two commands raise a device specific error (Exception) when a connection can not be established or terminated.
Use the is_connected() method to check if a connection with the controller is established. This command returns True if there is a working connection with the device, False otherwise.
This interface shall be implemented by device controller classes, device simulators, and Proxy sub-classes. Examples of device controllers are PunaController and ThorlabsPM100Controller, while their simulators are called PunaSimulator and ThorlabsPM100Simulator and the Proxy sub-classes PunaProxy and ThorlabsPM100Proxy.
In the example below we make a connection to the PUNA Hexapod and issue a homing and an absolute movement command, then close the connection.
from egse.hexapod import HexapodError
from egse.hexapod.symetrie.puna import PunaController
puna = PunaController()
try:
puna.connect()
puna.homing()
puna.move_absolute(0, 0, 18, 0, 0, 0)
except HexapodError as exc:
logger.error(f"There was an error during the interaction with the PUNA Hexapod: {exc}")
# do recovery action here if needed
finally:
if puna.is_connected():
puna.disconnect()Most of the Controllers can also be used as a context manager. The following code does the same as the example above. The connection is automatically established and terminated by the context manager.
from egse.hexapod.symetrie.puna import PunaController
with PunaController() as puna:
puna.homing()
puna.move_absolute(0, 0, 18, 0, 0, 0)Connection Interface for Proxy Classes
Proxy classes make a connection to a control server, e.g. the PunaProxy class will make a connection to the PunaControlServer. The control server will in turn be connected to either a Controller or a Simulator. The Proxy classes are called this way, because they act as a gateway for device commands, i.e. the proxy forwards device commands to the Controllers through the control server.
As stated above, a Proxy sub-class implements the device connection interface with the connect(), disconnect(), and is_connected() methods. That is because a Proxy completely mimics a Controller device interface. The Proxy however also establishes and manages a connection with its control server, but we cannot use the same connection interface for this type of connection.
The Proxy connection to its control server is defined by the ControlServerConnectionInterface and is implemented in the Proxy base class. This interface defines the following commands:
-
connect_cs, -
disconnect_cs, -
reconnect_cs, -
reset_cs_connection, -
and
is_cs_connected.
Use the connect_cs() and disconnect_cs() methods to establish and terminate a connection to the control server. The reconnect_cs() method currently basically does the same as the connect_cs() method, it is provided as a convenience to make the flow of connecting and reconnecting clearer in your code when needed.
Use the reset_cs_connection() method when the connection is in an undefined state. This method will try to connect and reconnect to the control server for a number of retries before failing.
Use the is_cs_connected() method to check if a connection with the control server is established. This command returns True if there is a working connection with the server, False otherwise.
This interface is implemented in the Proxy base class and there is no need to worry about this in your Proxy sub-class implementation.
Also a Proxy can be used as a context manager. The example for the PunaController above can therefore be rewritten for the PunaProxy:
from egse.hexapod.symetrie.puna import PunaProxy
with PunaProxy() as puna:
puna.homing()
puna.move_absolute(0, 0, 18, 0, 0, 0)Note however that the Context Manager in this case will connect and disconnect to the control server, leaving the connection to the hardware device untouched.
14. The System Under Test (SUT)
-
Commanding is the same as all other devices, DPU Control Server and Controller, Proxy, etc
-
DPU Processor as a separate process to communicate to the FEE (Simulator)
-
DPU Protocol starts the DPU Processor process
-
DPU Controller and DPU Processor communicate via three Queues, the command queue, the response queue, and a priority queue.
-
Timing: timecode packet, HK packet, [Data packets], Commanding through RMAP requests
-
Describe the transport
14.1. DPU Control Server and DPU Processor
The DPU Control Server (used to be called the DPU Simulator in older documents) acts like any other control server. It’s Protocol class (DPUProtocol) starts a DPUController which implements the commands that are defined in the DPUInterface class. Specific DPU commands are sent to the control server using the DPUProxy class. The DPUProxy class also implements the DPUInterface.
The difference with normal device control servers lies in the additional sub-process which handles the communication with the N-FEE. This separate process, the DPUProcessor, is also started by the DPUProtocol and both the DPUProcessor and the DPUController communicate via three multiprocessing Queues, the command queue, the response queue, and a priority command queue. The main task of the DPUProcessor is to communicate with the N-FEE, i.e. command it via SpaceWire RMAP Requests and retrieve housekeeping and data packets that are sent to the Storage manager. The commands that the DPUProcessor must execute are passed through the command queue by the DPUController. Every readout cycle the DPUProcessor checks the command queue and passes any available command to the N-FEE as an RMAP Request.
Commands that are given on the Python prompt are by definition synchronous meaning when you call a function or execute a building block, the function or building block will wait for its return value before finishing. This is usually not a problem, because we most of the time have a pretty good idea how long a calculation or action will take. Most functions return within a few hundred milliseconds or less, which is practically immediate. When commanding the N-FEE however, things are more complicated. The N-FEE has strict timing when it comes to commanding. During the sync period (usually 6.25s unless commanded different) there is a slot of at least 2s at the end of the period, which is reserved for commanding. The sync period starts with a timecode packet followed by the N-FEE housekeeping packet. That takes just a few milliseconds. Depending on the N-FEE mode, we can then expect data packets filling up until 4s after the time code. There can be less or no data packets, leaving more time for commanding. Commanding the N-FEE is done by sending SpaceWire RMAP requests to the N-FEE in that 2s+ timeslot. When we send a command from the Python prompt to the N-FEE, it arrives in the command queue at the DPUProcessor and will be sent to the N-FEE in the next 2s+ command timeslot. When the Command enters the Queue at the beginning of the readout period, i.e. right after the timecode, maximum 4s will pass before the command is actually send to and executed on the N-FEE. All this time, the Python prompt will be blocked while waiting for the response. The next command can only be sent on return of the previous. So, we have two issues to solve, (1) the duration and blocking of all the steps in the commanding chain, and (2) sending more than just one command to the N-FEE in the same timeslot.
XXXXX: add here how we solved this!
The priority queue is also a command queue, but the commands are not sent to the N-FEE. Instead, the commands are executed in the DPUProcessor and are used to either get information about the state of the N-FEE or set/get the internal state of the DPUProcessor. The state of the N-FEE is mirrored and kept up-to-date by the DPUProcessor during the readout cycle. Priority commands are typically to request e.g. the N-FEE mode, or to set an internal DPU parameter. While the command queue is checked only during the allowed RMAP communication period, the priority queue is checked and executed several times during the readout cycle.
The DPU Processor has two ZeroMQ message queues on which it publishes specific information. One message queue is the data distribution queue on which the following information is published. All messages published on this queue are multipart messages with the following IDs to which you can subscribe.
- SYNC_TIMECODE
-
Whenever the N-FEE sends a timecode to the DPU, the timecode is published on the message queue as a tuple with (timecode, timestamp). The timecode is an integer number cycled on the sequence from 0 to 63 and incremented on every sync pulse, both 200ms and 400ms pulses. Since the N-FEE does not have an internal clock that keeps the time, we associate a timestamp with the time of reception of the timecode by the DPU Processor. The timecode itself is created and send by the N-FEE to the DPU over the SpaceWire interface within 1μs after receiving the sync pulse from the AEU. Reception at the DPU Processor, creating the timestamp etc. results in a delay of approximate 15ms.
- SYNC_HK_PACKET
-
Right after the timecode, the N-FEE sends out a housekeeping packet. When this packet is received at the DPU Processor, it is published on the data distribution message queue as a tuple with (HousekeepingPacket, timestamp). Again, the timestamp is the time of reception at the DPU Processor.
- SYNC_DATA_PACKET
-
When the N-FEE is in FULL_IMAGE mode with
digitise_en=1it will send out data packets containing the image data from the readout. Depending on the number of rows that are digitised the N-FEE will send out a variable number of data packets. Each of these packets are published on the data distribution queue as a tuple with (DataPacket, timestamp). The DataPackets can be of type DataDataPackets or OverscanDataPackets. - N_FEE_REGISTER_MAP
-
At the start of every readout cycle, the DPU Processor puts a Numpy array of type UINT8 on the message queue. This Numpy array is the memory map that contains and defines the Register Map. Note, that the data from this memory map is a copy, a mirror, of the memory map in the N-FEE.
- NUM_CYCLES
-
The internal DPU Processor counter
num_cyclesis used to allow the user to command a number of readout cycles in full image mode. This counter is needed because the N-FEE has no concept of 'number-of-images', i.e. you can not ask the N-FEE to take 10 images. Nevertheless, we wanted this functionality in our test scripts, and that is whatnum_cyclesis. If you commandnum_cycles=10the N-FEE will be put into full image mode, generate image data for 10 readout cycles, and is after that instructed to go to DUMP mode (see [dump-mode]).
The data distribution message queue is used by processes that need to handle image data like the DPU GUI. There is a second message queue used by the DPU Processor to publish monitoring information. In addition to SYNC_TIMECODE, SYNC_HK_PACKET, NUM_CYCLES, the following information is published on this message queue:
- HDF5_FILENAMES
-
A list of HDF5 path names that are ready and available for processing.
- SYNC_ERROR_FLAGS
-
On each readout (every 200ms and 400ms pulse), after all housekeeping and data packets have been received from the N-FEE, the DPU Processor reads out the housekeeping memory area from the N-FEE. This memory area is at that time just updated by the N-FEE and therefore can contain new information with respect to the beginning of the readout. Especially the error flags –which are in the housekeeping information– are of interest because they can indicate errors that happened during the readout while the original HK packet might not yet contain any errors. The error flags are sent as a tuple with (error flags, frame counter, timestamp). The error flags is an integer that represents a bitfield of (currently) 16 flags.
Any process can subscribe to the monitoring queue easily by using the DPUMonitoring class. For example, the following code snippet connects to the DPU Processor monitoring queue, waits until the next timecode is received, then executes some code and waits for the next timecode.
from egse.dpu import DPUMonitoring
with DPUMonitoring() as moni:
while moni.wait_for_timecode():
...If you need more control over the monitoring and the actions, you can subscribe to the DPU Processor monitoring queue directly. The following code snippet waits for an error flag and raises an alert message on Slack whenever the error flag is not 0:
import zmq
import pickle
from egse.zmq import MessageIdentifier
from egse.slack import send_alert
hostname = "localhost"
port = 30102
sub_id = MessageIdentifier.SYNC_ERROR_FLAGS.to_bytes(1, byteorder='big')
context = zmq.Context()
receiver = context.socket(zmq.SUB)
receiver.connect(f"tcp://{hostname}:{port}")
receiver.subscribe(sub_id)
while True:
try:
sync_id, message = receiver.recv_multipart()
sync_id = int.from_bytes(sync_id, byteorder='big')
error_flags, frame_counter, timestamp = pickle.loads(message)
msg = f"{MessageIdentifier(sync_id).name}, {error_flags = } for {frame_counter = }"
print(msg)
if error_flags:
send_alert(msg)
except KeyboardInterrupt:
print("KeyboardInterrupt caught!")
break
receiver.close(linger=0)14.1.1. The Inner Loop
The inner loop is the workhorse of the DPUProcessor, it has three main functions (1) reading information and data that is provided by the N-FEE, (2) sending that data to the storage manager, and (3) send commands to the N-FEE. In pseudo language, the inner loop performs the following functions:
while True:
try:
timecode = read_timecode() (1)
save_timecode(timecode)
hk_packet = read_housekeeping_packet() (2)
save_housekeeping(hk_packet)
update_internals() (3)
process_high_priority_commands() (4)
if FULL_IMAGE_MODE: (5)
until last_data_packet:
data_packet = read_data_packet()
save_data_packet(data_packet)
hk_data = read_hk_data() (6)
save_hk_data(hk_data)
for each cycle: (7)
save_attributes(obsid, num_cycles, register_map)
publish_data_and_monitoring_info()
except:
report error but do not abort (8)
process_high_priority_commands() (9)
if commands_on_queue:
send_commands_to_nfee() (10)-
The first information that the N-FEE sends out is the timecode. The timecode is an integer that cycles through the values from 0 to 63 (a six bit number). The timecode is sent within 2μs from the sync pulse that the N-FEE receives from the N-AEU, but it is not associated with a timestamp. Since the N-FEE has no concept of on-board time, the DPUProcessor will have to associate a timestamp with the timecode. That timestamp is the time of reception of the timecode and it will be typically a few ms delayed. This timestamp is saved in the HDF5 file as an attribute of the timecode.
-
The next thing the N-FEE sends out over the SpaceWire interface is a housekeeping packet. It is sent immediately after the timecode. Also here, the DPUProcessor generates a timestamp at reception and saves this timestamp together with the complete housekeeping packet.
-
The DPUProcessor keeps internal information and bookkeeping parameters in order to mimic the state of the N-FEE FPGA. This information is updated from the register map and is dependent on where we are in the readout cycle, e.g. start of the cycle, long-or-short pulse, etc.
-
Since the DPUProcessor keeps itself in sync with the state of the N-FEE, there is no need to consult the N-FEE about its state over an expensive SpaceWire RMAP request. So, if a user wants to know the operating mode of the N-FEE or other state information like e.g. the current frame number or the synchronisation mode, this information comes directly from the DPUProcessor internal state instead of passing the request through to the N-FEE. That is what high priority commands do, they do not wait for the safe time range where we can send RMAP commands, but return immediately with the answer loaded from the internal state of the DPUProcessor.
-
When the N-FEE is in full image mode, the CCDs are read out and image data is sent out over the SpaceWire. Depending on the amount of data this can take up to about 4 seconds (a little bit more is possible). The amount of image data depends on a few register parameters, namely,
v_startandv_enddefine the number of rows that are read out,h_enddefines the number of columns to read out per CCD side,sensor_selspecifies which CCD side has to be readout (or both). So, we can read out only part of the CCDs and this will result in less data being transferred and less time to spent in this loop. Reading out only part of the CCD is called partial readout mode. -
When the N-FEE has finished reading out the CCDs and sending out the image data, the housekeeping area in the N-FEE memory map will be updated with the current state of the HK parameters. This updated housekeeping will be important especially for status information and error flags. The error flags can contain information about transmission buffers that overflow, EDAC[4], link errors etc. So, at this point we read out the updated housekeeping data and stores that next to the original HK packet.
-
For each readout cycle we have some additional things to do before we will send RMAP commands to the N-FEE. This pseudo statement might be a little misleading, it’s not a
foreachloop, but a condition that we need to execute the two enclosing statements for every readout cycle (aka frame). So, for each frame we will save important attributes that are used by the data processing, and we will also publish the data we have and any required additional information on the message queue. Other processes can subscribe to the message queue to be informed about the state of the N-FEE or to receive data for visualisation or processing (e.g. the DPU GUI or the FITS generation). -
In principle, the pseudo commands that we have described upto now define one complete cycle of N-FEE information, i.e. timecode, housekeeping, and data. If we would never have to change the state of the N-FEE and would not send commands over the SpaceWire, the loop would repeat here. Of course, we want to do other things and communicate with the N-FEE and that will be described in the following paragraphs 8-10, but also important is to understand that things can go wrong and exceptions can be raised because of SpaceWire hick-ups, timeouts, disk full errors from the storage, and many more. That is why we put all the previous commands in a
tryclause (the statements between thetryandexceptkeywords). Whenever something goes wrong and an exception is raised, theexceptclause is executed and the error is logged with possibly extra debugging information. At this point we do not (as is usually done elsewhere) abort and exit the inner loop, but we continue with the execution of the remaining statements.We do not want to abort because the DPUProcessor should never stop running. The idea is that, whenever an error occurs, the remaining statements from the
tryclause are skipped, the error is reported, we have the opportunity for high priority commands or to send commands to the N-FEE, and then cycle through until the next timecode. In case of a link corruption or when the DPU to N-FEE communication is out of sync, it might take a few loops to recover on the next timecode. But, eventually, a next timecode will be detected and the DPUProcessor can recover its communication and its state.If we do not receive information from the N-FEE on the SpaceWire, this is handled as an exception and a
NoBytesReceivedErrorwill be raised, also, waiting for the next timecode can raise aTimecodeTimeoutError. In these two cases, we will fall into theexceptclause, but no error will be logged and the execution will continue as normal after theexceptclause. This scenario will happen very frequently while waiting for SpaceWire packets or for the next timecode. -
After receiving the image data and updated housekeeping its time again to process any high priority commands from the queue.
-
The last thing to do before repeating the inner loop is to send any RMAP commands that are waiting on the command queue. One of the first commands that will be sent by default is to clear any error flags, after that a command will be read from the queue, processed and send to the N-FEE as an RMAP request. All commands that are sent to the N-FEE are also saved in the HDF5 file.
That concludes our inner loop for the DPUProcessor. Please keep in mind that this description is a simplification of the real inner loop and you will need to carefully study the code before making any changes.
14.2. The N-FEE Simulator
TBW
14.3. CCD Numbering
Throughout the PLATO camera test campaigns, the CCD numbering, used throughout the CGSE, will remain the same (see figure below), but the underlying numbering, used by MSSL for the N-FEE will be different for EM, PFM, and FM.
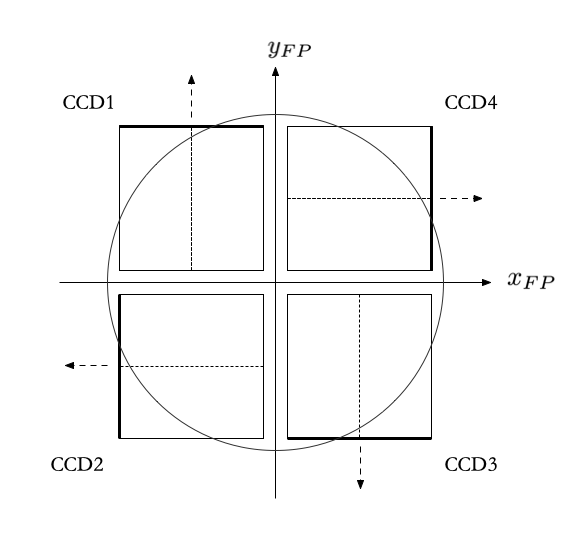
14.3.1. MSSL Numbering
The MSSL numbering of the CCDs is used in:
-
the SpW packets with the raw image data;
-
the N-FEE register map (used for configuration and queries).
14.3.2. Conversions MSSL ⇆ CGSE
Originally, the conversion back and forth between the MSSL and CGSE numbering was configured in egse.fee in the following variables:
-
CCD_BIN_TO_ID: for the conversion from MSSL numbering to CGSE numbering (used in the FITS persistence layer, DPU UI and HDF5 viewer); -
CCD_BIN_TO_IDX: for the conversion from MSSL numbering to display index in the DPU UI; -
CCD_ID_TO_BIN: for the conversion from CGSE numbering to MSSL numbering; -
CCD_IDX_TO_BIN
The DEFAULT_CCD_READOUT_ORDER variable holds the default order of the CCD readout, as defined in the N-FEE register.
14.3.3. Register map
14.3.4. Moving to the Setup
The idea is that these conversions will be moved to the setup file, under setup.camera.fee.ccd_numbering. The name of the relevant parameters is the same as above, but in small case.
14.3.5. EM
The CCD numbering in the CGSE and the connections to the PCBs for EM are shown in the figure below. Between brackets are the CCD numbers by MSSL. Not only do the CCD numbers not match between MSSL and the CGSE, but the connections between the CCDs and the corresponding PCBs is incorrect. The latter will be corrected for in PFM.
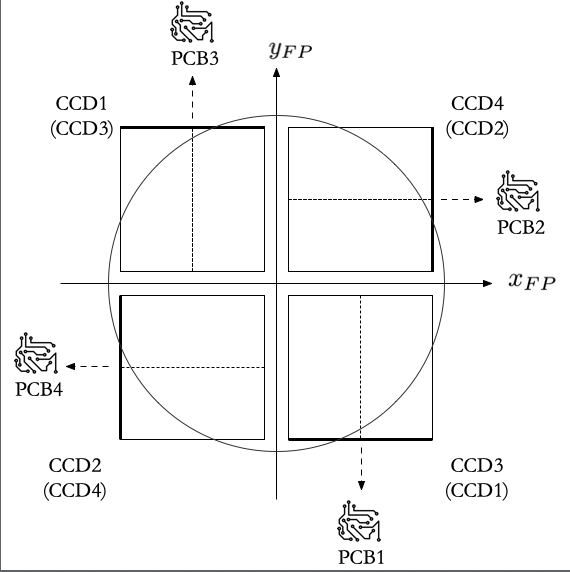
Reference Documents
The entries in the N-FEE register map for EM are stipulated in the following reference document:
N-FEE ICD |
PLATO-MSSL-PL-ICD-0002 (issue 12.0, 05/05/2022) |
Register map (Attachment) |
PLATO-MSSL-PL-PL-FI-0003_1.0_N-FEE_EM1_EM2_Register_MAP.xlsx |
Common EGSE
CDD conversions
-
CCD_BIN_TO_ID: [3, 4, 1, 2]
-
CCD_BIN_TO_IDX: [2, 3, 0, 1]
-
CCD_ID_TO_BIN: [0, 0b10, 0b11, 0b00, 0b01]
-
CCD_IDX_TO_BIN: [0b10, 0b11, 0b00, 0b01]
CCD IDs
-
CCD1: 0b10
-
CCD2: 0b11
-
CCD3: 0b00
-
CCD4: 0b01
Default readout order
Deviations from the N-FEE ICD
Incorrect connection between the PCBs and the CCDs:
-
According to the spreadsheet for EM (see above), the default CCD readout order is 228 (decimal value). This is supposed to correspond to the requested CCD readout scheme 1 - 2 - 3 - 4 (e.g. when going to dump mode), but - due to the incorrect connections between the PCBs and the CCDs - this actually corresponds to 3 - 4 - 1 - 2.
-
To compensate for this, the default CCD order as configured in the setup does not correspond to what is in the spreadsheet: instead of using 0b11100100 (228), we use 0b01001110 (0x4E or 78).
CGSE Configuration
-
Register map: plato-cgse-conf/data/common/n-fee: n_fee_register_em_v2.yaml
-
HK map: plato-cgse-conf/data/common/n-fee: n_fee_hk_em_v2.yaml
-
Sensor calibration: plato-cgse-conf/data/common/n-fee: nfee_sensor_calibration_em_v3.yaml
14.3.6. PFM
For PFM, the following modifications will be applied w.r.t. EM:
-
The CCDs will be connected to the PCB with the same number;
-
Part of the entries in the N-FEE register map will move places.
The CCD numbering and the connections to the PCBs for PFM are shown in the figure below. Note that the underlying MSSL numbering is the same as for EM.
fm.png)
Reference Documents
The entries in the N-FEE register map for PFM are stipulated in the following reference document:
N-FEE ICD |
PLATO-MSSL-PL-ICD-0002 (issue 12.0, 05/05/2022) |
Register map (Attachment) |
PLATO-MSSL-PL-PL-FI-0003_1.0_N-FEE_PFM_Register_MAP.xlsx |
Common EGSE
CDD conversions
-
CCD_BIN_TO_ID:
-
CCD_BIN_TO_IDX:
-
CCD_ID_TO_BIN:
-
CCD_IDX_TO_BIN:
CCD IDs
-
CCD1:
-
CCD2:
-
CCD3:
-
CCD4:
Default readout order
CGSE Configuration
-
Register map: plato-cgse-conf/data/common/n-fee: n_fee_register_pfm_v1.yaml
-
HK map: plato-cgse-conf/data/common/n-fee: n_fee_hk_pfm_v1.yaml
-
Sensor calibration: plato-cgse-conf/data/common/n-fee: nfee_sensor_calibration_em_v3.yaml
14.3.7. FM
The CCD numbering and the connections to the PCBs for FM are the same as for PFM.
Reference Documents
The entries in the N-FEE register map for FM are stipulated in the following reference document:
N-FEE ICD |
PLATO-MSSL-PL-ICD-0002 (issue 12.0, 05/05/2022) |
Register map (Attachment) |
PLATO-MSSL-PL-PL-FI-0003_1.0_N-FEE_PFM_Register_MAP.xlsx |
Common EGSE
CDD conversions
-
CCD_BIN_TO_ID:
-
CCD_BIN_TO_IDX:
-
CCD_ID_TO_BIN:
-
CCD_IDX_TO_BIN:
CCD IDs
-
CCD1:
-
CCD2:
-
CCD3:
-
CCD4:
CGSE Configuration
-
Register map: plato-cgse-conf/data/common/n-fee: n_fee_register_fm_v1.yaml
-
HK map: plato-cgse-conf/data/common/n-fee: n_fee_hk_fm_v1.yaml
-
Sensor calibration: plato-cgse-conf/data/common/n-fee: nfee_sensor_calibration_em_v3.yaml
Default readout order
14.4. The F-FEE Simulator
TBW
15. SpaceWire
This chapter describes all facets of the SpaceWire interface from and to the camera. We use the 4Links Diagnostic SpaceWire Interface (DSI) with one port to connect to the N-CAM and 4 ports to connect to the F-CAM. The following topics will be explained in this chapter.
-
The SpaceWire Lab interface
-
SpaceWireInterface class
-
SpaceWireOverDSI
-
SpaceWireOverZeroMQ
-
-
Connecting to the device
-
Speed
-
active link
-
-
testing your connection
15.1. The SpaceWire Lab Interface – Hardware
In the lab we use a SpaceWire interface from 4Links. This company provides devices to communicate over SpaceWire, but also to monitor, diagnose, develop your SpaceWire connections.
Two of these devices are used in the different institutes that test the PLATO cameras, i.e. the Diagnostic SpaceWire Interface (DSI) and the portable version of that (P-DSI). These devices have 2, 4, or 8 SpaceWire ports that can work concurrently at a speed up to 400Mbps. A 1Gbps Ethernet port connects your server to the DSI. 4Links provides software to drive the DSI and communicate with the camera over SpaceWire. The main component is a dynamic shared library EtherSpaceLink which is a C library that provides functionality to read and write SpaceWire packets from the active ports.
A Python wrapper module exists and is also delivered by 4Links, but at the time we were developing the CGSE, this Python interface was not available yet. We have implemented our own wrapper functions using the ctypes Python module.
The setup that is used in the lab is shown in the figure below. The N-CAM is connected to SpW port 1 on the DSI and the egse-server is connected to the Ethernet port.
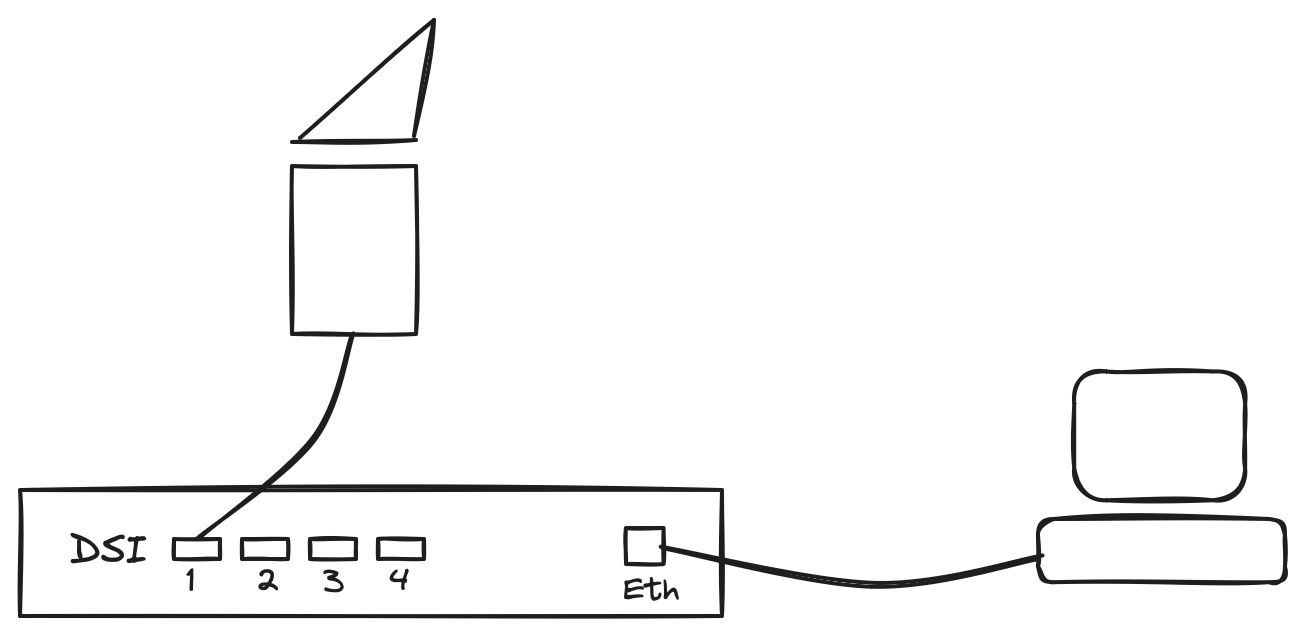
The IP address of the DSI is different for each test house and is therefore configured in the local Settings file. The DSI is listening on TCP port 4949.
15.2. The SpaceWire Interface class – Software
The SpaceWireInterface class is the high-level base class that is used to communicate with a SpaceWire device. This class is intended as an interface class and shall not be used directly. We have provided two concrete sub-classes that inherit from the SpaceWireInterface, i.e. the SpaceWireOverDSI and the SpaceWireOverZeroMQ. The interface defines the following methods:
connect()-
open a connection to the SpaceWire interface. All parameters that are needed to establish the connection must be passed when instantiating the concrete sub-class.
disconnect()-
disconnect from the SpaceWire interface.
configure()-
configure the SpaceWire device interface. All parameters that are needed to configure the connection must be passed when instantiating the concrete sub-class.
flush()-
flush any remaining data from the wire.
send_timecode(timecode: int)-
send a timecode packet.
read_packet(timeout: int = None)-
read a SpaceWire packet. The packet is returned as a bytes object and can be converted using the factory method
SpaceWirePacket.create_packet(). write_packet(data: bytes)-
write a SpaceWire packet.
read_register(self, address: int, length: int = 4, strict: bool = True)-
read data from the register map of the camera. There are restrictions on the address space and the number of bytes that can be read. The
strict=Trueargument enforces these restrictions. write_register(self, address: int, data: bytes)-
write a register to the given address location in the memory map of the camera. The data shall be at least 4 bytes (only 4 bytes will be written).
read_memory_map(self, address: int, size: int)-
read data from the memory map of the camera. The size of the data that can be read is dependent on the address space from which the data is read.
Sub-classes of the interface class can implement additional methods that are specific for that device, but only the interface methods shall be used in processes like the DPU Processor and the FEE Simulator.
The interface class can also be used as a context manager where it will open the connection upon entry and close the connection upon exit or when an exception happens.
with SpaceWireOverDSI(dsi_address) as transport:
transport.configure()
while True:
flags, data = transport.read_packet(timeout=2000)
if 0 <= len(data) <= 1:
break
...Note that the connection is only established by entering the with statement, so, what usually is done is that the SpaceWireInterface sub-class is instantiated at a higher level in a caller function and past into the functions that use it.
transport = SpaceWireOverZeroMQ(endpoint="tcp://localhost:5555", identity="PEER-TO-PEER")
...
def serve(transport: SpaceWireInterface):
with transport:
transport.configure()
...
15.2.1. Connecting to the DSI
TBW
-
Set/Get speed
-
Set/Get active port
-
Low-level functions:
esl_*
15.3. Testing your connection
TBW
Using the unit tests….
15.4. The RMAP Protocol
TBW
Give a brief overview of the RMAP protocol as it is used in PLATO and describe how RMAP and DSI commands and functions work together.
-
ReadRequest and ReadRequestReply
-
WriteRequest and WriteRequestReply
-
…
15.5. A more elaborate example
In this section we will present a more in-depth example of both connections of the SpaceWireInterface, i.e. the sending and the receiving part.
16. Device Simulators
-
Different ways to write a simulator
-
implement a Simulator class that can replace a Controller class
-
implement a simulator process
-
16.1. The OGSE Simulator
The OGSE simulator by default listens on TCP port 4181 for incoming connections from the OGSE Controller. The controller can be used stand-alone in a Python REPL for testing or can be part of the OGSE Control Server as the last step in the commanding chain.
Start the OGSE simulator as follows:
$ ogse_sim start
The OGSE simulator will listen for incoming connections. There can be only one process connected to the OGSE simulator. This behaviour is similar as the hardware device, which only accepts one connection. When a connected process disconnects, the OGSE simulator will accept a new connection.
The OGSE simulator can be killed by pressing CTRL-C in the Terminal where the simulator is running. Alternatively, you can send a TERM or HUP signal to the process:
$ ps -ef|grep ogse 459800007 21334 1908 0 2:20PM ttys002 0:01.02 /Library/Frameworks/Python.framework/Versions/3.8/Resources/Python.app/Contents/MacOS/Python /Users/rik/git/plato-common-egse/venv38/bin/ogse_sim start $ kill -TERM 21334
The OGSE simulator has of course no interlock jack that you can pull out to immediately power off the system. Nevertheless, we can simulate this behaviour by sending a user signal to the ogse_sim process. Sending a USR1 signal will open the interlock when it is closed, and close it when it is open. The USR1 signal works as a toggle for the interlock.
$ kill -USR1 <PID> (1)
| 1 | replace <PID> with the correct process identifier |
Check the interlock state with the command method get_interlock():
>>> ogse = OGSEController() >>> ogse.connect() >>> ogse.get_interlock() 'interlock: OPEN'
The following commands have been implemented in the simulator:
status() |
return the status of the power, lamp, interlock, laser, power meters, and attenuator |
get_interlock() |
state is OPEN or CLOSE |
get_power() |
state is On or OFF |
get_lamp() |
state is ON or OFF |
get_laser() |
state is ON or OFF |
get_lamp_fault() |
state is ERROR or NO-ERROR |
get_controller_fault() |
state is ERROR or NO-ERROR |
get_psu() |
state is ON or OFF |
get_operate() |
state is On or OFF |
get_flags() |
the state of all parameters encoded in a single number formatted in hexadecimal and binary |
get_power_and_temperature() |
returns the power and temperature reading of both power-meters |
ldls_status() |
returns the state of the connection to the LDLS device, state is OK or ERROR |
pm_status() |
returns the state of the connection to the power-meter devices, state is OK or ERROR |
att_get_level() |
returns a dictionary with the following keys: att_moving [bool], att_factor [float], and att_index [int] |
att_status() |
returns the state of the connection to attenuator device, state is OK or ERROR |
att_set_level_index(<index>) |
Sets attenuator to the level closest to <index> |
att_set_level_factor(<factor>) |
Sets attenuator to the level closest to <factor> |
att_set_level_position(<wheel1>, <wheel2>) |
sets the two filter wheels to the given position, each wheel has 8 positions, allowed values are 1 to 8. |
att_level_up() |
selects the attenuation one step higher than the current value, it has no effect if the current level is already the highest |
att_level_down() |
selects the attenuation one step lower than the current value, it has no effect if the current level is already the lowest |
version() |
returns the version of the hardware controller software |
power_on() |
turns the power supply on |
power_off() |
turns the power supply off |
operate_on() |
turns the laser on |
operate_off() |
turns the laser off |
exit() |
|
quit() |
|
reset() |
Part IV — Essential Toolkit and Infrastructure Elements
17. Essential Toolkit
This chapter describes the tools necessary for the software’s operation, even if they’re not the main features of the system.
17.1. The NavigableDict class
This class serves as a representation of a nested Python dictionary, enabling navigation through its contents using dot notation, offering an alternative to traditional keyword-based access.
Let’s create a nested dictionary with some configuration information:
config = {
"server": {
"host": "localhost",
"port": 8080,
"secure": True,
},
"logging": {
"level": "info",
"destinations": ["console", "file"],
"file": {
"path": "/var/log/app.log",
"max_size": "10MB",
"backup_count": 5
}
},
}
Both examples below are equivalent:
>>> print(config)
{
'server': {'host': 'localhost', 'port': 8080, 'secure': True},
'logging': {'level': 'info', 'destinations': ['console', 'file'], 'file': {'path': '/var/log/app.log', 'max_size': '10MB', 'backup_count': 5}}
}
>>> log_file = config["logging"]["file"]["path"]
>>> print(log_file)
/var/log/app.log
and
>>> from egse.setup import NavigableDict
>>> config = NavigableDict(config)
>>> print(config)
NavigableDict
├── server
│ ├── host: localhost
│ ├── port: 8080
│ └── secure: True
└── logging
├── level: info
├── destinations: ['console', 'file']
└── file
├── path: /var/log/app.log
├── max_size: 10MB
└── backup_count: 5
>>> log_file = config.logging.file.path
>>> print(log_file)
/var/log/app.log
- TBW
-
-
Special entries: class//, factory//, int_enum//, csv//, pandas//, yaml//
-
memoized keys
-
private attributes
-
raw values
-
ALL keys shall be of type 'str'
-
17.2. The SubProcess class
TBW
17.3. The ProcessStatus class
TBW
17.4. The RegisterMap
TBW
===
18. Infrastructure Elements
This chapter describes the components that are part of the underlying structure that supports the software’s functionality. We will describe support functions for working with binary data like bit-fields or checksums, describe special decorators and how resources are used, there will be an explanation of support functions to find files, and use environment variables, and many more.
TBW
18.1. Bits, Bytes and Hex
TBW
18.2. Reloading functions and modules
TBW
18.3. Time and Timing
TBW
18.4. Resources
TBW
Part V — Monitoring
19. Metrics, Prometheus and Grafana
The CGSE provides mechanisms for monitoring metrics from different processes and devices with Grafana. This chapter will explain how the metrics are defined for your favorite process and device, how their values are gathered and propagated to the Prometheus server and how Grafana queries Prometheus to create timeseries that are displayed in your browser.
19.1. Setup Prometheus
-
what should go in the
prometheus-egse-server.yml -
what about the timestamps that are associated with the metrics?
19.2. Define your metrics
Depending on your needs, you can choose different methods for the timestamp of your metrics. We will discuss three ways to get and use metrics timestamps:
-
the timestamp for the metric comes with the device housekeeping.
-
the timestamp is created by the device controller when the metric is retrieved.
-
the timestamp is created by Prometheus and is the time of querying the http server that is started by each of the control servers.
Option 1. is the best way for timestamps for your metrics when the accuracy of the time when the metric was retrieved is important. The timestamp then itself is a metric (Gauge) and might need to be converted to a float that represents the time in the expected way, depending on the target application.
import prometheus_client as prom
x = prom.Gauge("x", "the metric")
x_ts = prom.Gauge("x_ts", "the metric timestamp")
# Option 1: timestamp is a metric
x.set( <the value of the parameter> )
x_ts.set( <the timestamp for the value as a float> )Option 2. can be used when the device housekeeping doesn’t contain the timestamp of the metrics. This method can be a few to a few tens of milliseconds off depending on the device response time. For some devices and depending on the duration of the query and the number of parameters this can be even longer. One example is the DAQ6510 when tens of temperatures are scanned several times before returning an average value. A full scan can take up to 20s or more.
import prometheus_client as prom
import datetime
x = prom.Gauge("x", "the metric")
x_ts = prom.Gauge("x_ts", "the metric timestamp")
# Option 2. timestamp is set by the device controller
x.set( <the value of the parameter> )
x_ts.set(datetime.datetime.now(tz=datetime.timezone.utc).timestamp())Option 3. is used when the exact time is not really important and may be a few (tens of) seconds off. This is the case for most temperature measurements evolving slowly.
The time used by Prometheus is the unixtime which means localtime (not UTC) and Epoch 01/01/1970, excluding leap seconds. This is the same as what is returned by the Python time.time() function.
Part VI — Test Scripts
This section of the development manual is about developing test scripts to run the PLATO camera performance tests. If you were looking for unit tests, see Part VII — Unit Testing and beyond.
20. Observations
-
What are observations?
-
Why do we need them?
21. Building Blocks
-
what are building blocks?
-
why do we need them?
-
where do they live?
-
how are they implemented?
-
only keyword argument
-
-
how are they executed?
-
all keyword arguments must be explicitly provided → explain why
-
-
generate_command_sequence()????
-
need to be executed within an observation (between start_ and end_observation() or by execute()) to enforce the creation of a unique obsid.
A building block is a Python function implementing the commands corresponding to a logical entity within a test or denoting an entire test (called the “test-script”). The function is decorated with a @building_block and has several benefits and restrictions that will be explained in this section. A typical small building block is shown below:
@building_block
def set_trp1(temperature: float) -> None:
"""
Set the temperature setpoint for TRP1.
Args:
temperature: Temperature setpoint for TRP1 [°C].
Raises:
If a task is already running in the TCS EGSE, an Abort is raised.
"""
if is_task_running():
raise Abort("Cannot change the TRP1 setpoint, a task is running on the TCS")
tcs: TCSInterface = GlobalState.setup.gse.tcs.device
tcs.set_parameter(name="ch1_tset", value=temperature)
tcs.commit()A building block can only run within the context of an observation and all the arguments need to be explicitly provided as keyword arguments. The reason for this is the concept of explicit is better than implicit which definitely holds for commanding test equipment and certainly a million dollar PLATO Camera. The requirement to explicitly provide all arguments with their name reduces the chance for making errors and prevents changes in argument defaults. The above building block will therefore be executed as follows:
from camtest.commanding import tcs
start_observation("Configure the TCS EGSE")
...
tcs.set_trp1(temperature=-70.0)
...
end_observation()All functions that result in a change in the systems behaviour or a change in the test equipment shall be decorated as a building block. Status functions and so-called getters usually are not building blocks.
Building blocks implement some safeguards, imposing a number of limitations on the code:
-
Building blocks cannot be called recursively. Beware of building blocks calling other building blocks. Avoid too many layers. Avoid functions calling building blocks.
-
At run time, the names and the values of every argument of a building block must be explicitly given, even if the argument is
None. Building blocks with many parameters are hence strongly discouraged. -
Positional arguments are rejected in building blocks, all arguments must be specified as keyword arguments.
-
All arguments must be given the default value None in the building block definition.
The building block concept is part of the PLATO Test Scripts and not of the Common-EGSE. All building blocks that are defined will therefore live in the plato-test-scripts repository, mostly in the camtest.commanding module. The @building_block decorator itself is defined in the module camtest.core.exec.
The building block decorator is defined as def building_block(func: Callable) → Callable: which means the decorator must be used without brackets () or arguments. The function which is decorated must be defined with keyword only arguments that all have a default value of None.
The building block decorator performs the following actions and checks for the function at import time:
-
the decorated function
funcis attributed as a building block, i.e. thefuncwill get the attributeBUILDING_BLOCK_FUNCset toTrue. This is internally used in theexecutefunction to ensure the executed function is a building block. -
the decorator will check if a YAML file exists with the definition of default keyword arguments. The location of the YAML file is fixed.
|
Possible future change
Consider putting building block defaults in one defaults.yaml file located at the same location as the building block definition. That would create one file for all defaults at that location, instead of one file for each building block. What to do when two building blocks have identical names, but defined in a different module? |
The building block decorator performs the following actions and checks for the function at runtime:
-
check that no positional arguments are passed into the function,
-
fill the default value for keyword arguments that were not passed into the function, provided the function has defaults,
-
check if there are still missing arguments, required keyword arguments that have no default and are not provided in the call.
Then, before the function is actually called, the start_building_block() function is called. This will register the building block in the observation context and add the command to the command sequence in the GlobalState if this is a dry run. A corresponding end_building_block() will de-register the function from the observation context and the command sequence.
The overhead for a function decorated as a building block is about 350μs.
-
higher level test house independent commanding scripts
22. The Tasks GUI
The Tasks GUI is a generic GUI that allows the test operator to execute standard tasks by clicking the task button and provide the necessary arguments. An example of such a Task GUI is given in the screenshot below.
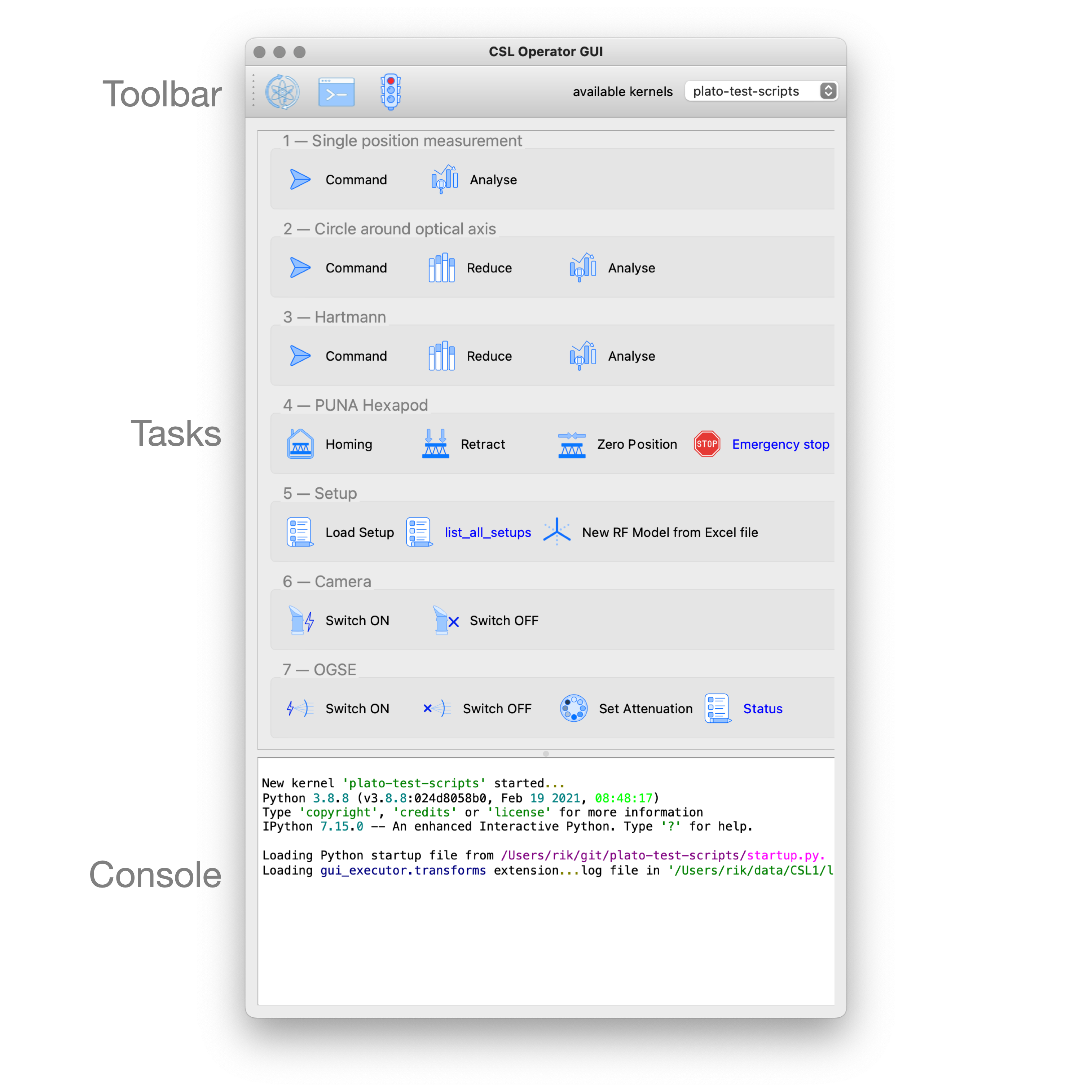
The Task GUI is organised in three panels that are arranged vertically in the window. The top panel is the toolbar to control the Jupyter kernel, the panel at the center contains all the task buttons organised by category, the bottom panel is the console where the output and error messages of the tasks will appear.
When you click on a task button, a fourth panel will appear above the console panel. This is the arguments panel where you can specify all arguments required for the task. Default arguments are shown in gray and can be left to use or overwritten to change. The arguments panel of the selected 'Analyse' task for the 'Circle around optical axis' group is shown below.
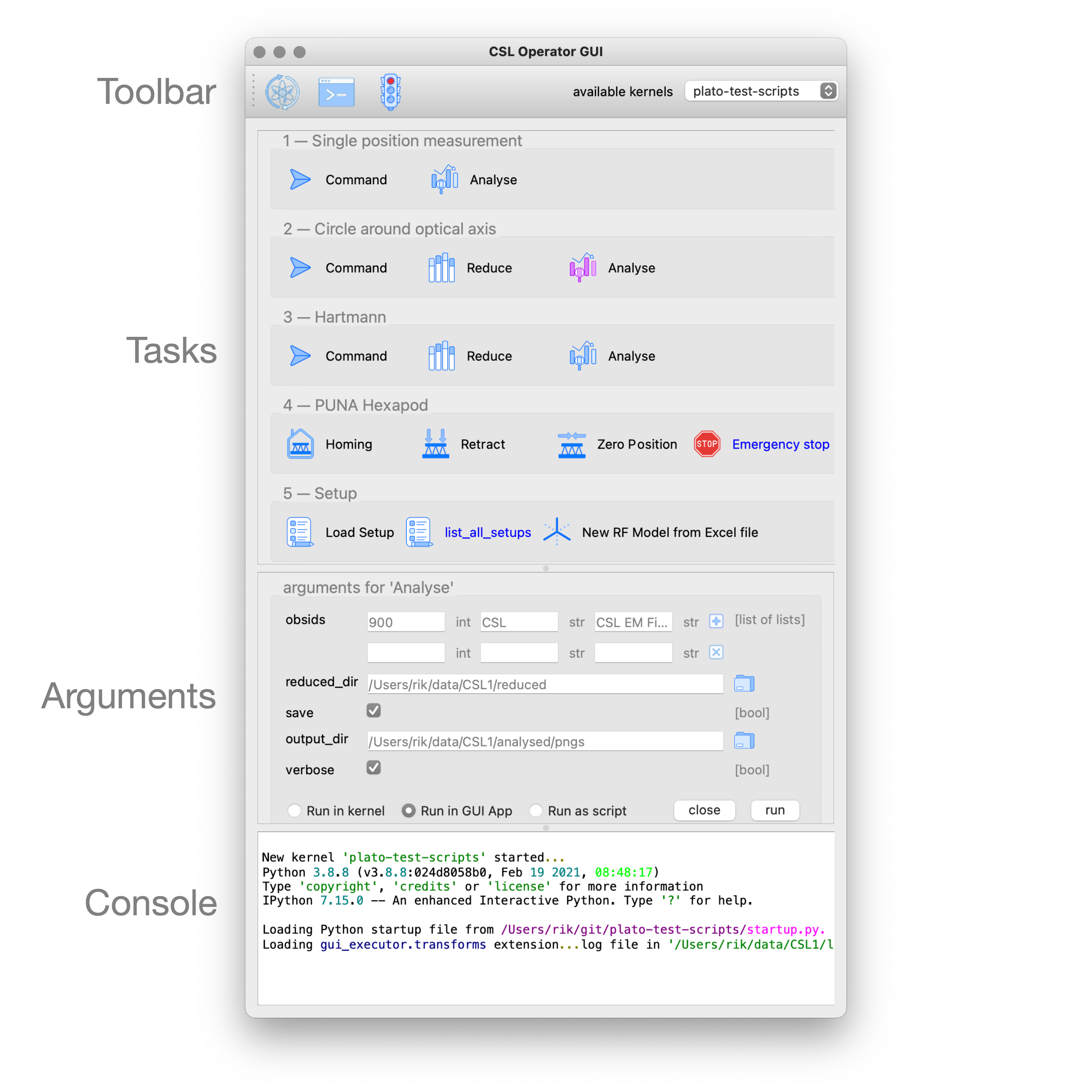
This 'Analyse' task accepts 5 arguments: a list of observation identifiers,the location of the reduced data, an option to save the generated plots in a given output folder, and a flag to make the tasks output more verbose. Since this task will produce plots, we want to execute it as a GUI App. Finally, the 'Close' button hides the arguments panel again and deselcts the task button, and the 'Run' button executes the task.
Other task GUIs will be developed for specific purposes. The CSL Operator GUI is specifically developed for CSL to execute alignment and focusing measurements. Other test houses will develop their own tasks and we have also generic task GUIs like the Contingency GUI that is used at all test houses and quickly switches devices on or off, and allows to perform simple device configurations. An early version of the GUI is shown below, you can clearly see this GUI has the familiar layout and functionality of any Task GUI.
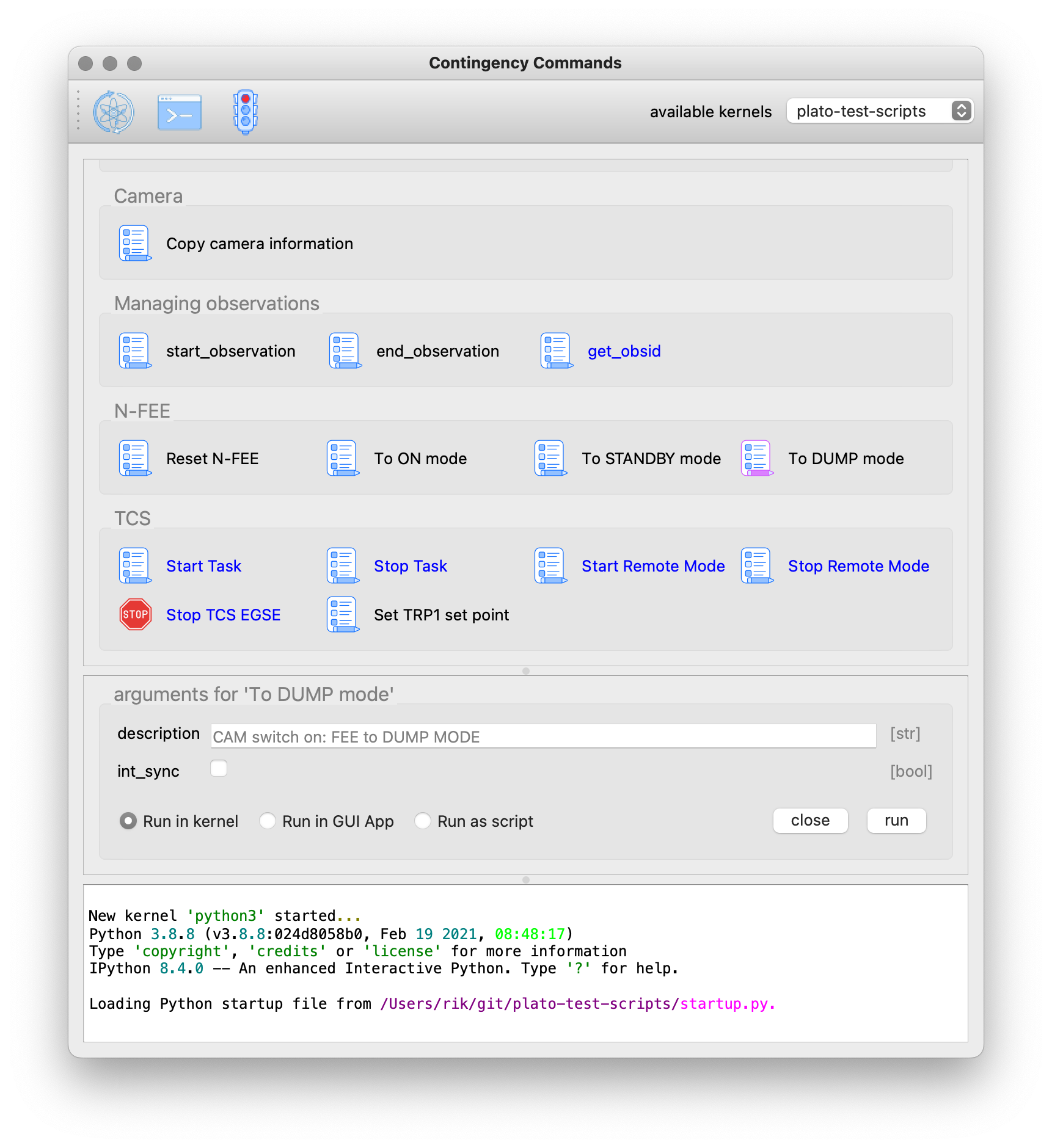
In the rest of this chapter we will explain how these GUIs are created and how you can develop your own version for your specific tasks.
22.1. The package Layout
To build up the Task GUI, we distinguish the task button as a function, several of these functions can be grouped in a Python module (a .py file) and all the modules plus additional information needed for the Task GUI is kept in a Python package. The CSL Operator GUI shown above, is located in the package camtest.csl and has the following layout:
camtest.csl ├──────── __init__.py ├──────── camera.py ├──────── circle.py ├──────── hartmann.py ├──────── hexapod.py ├──────── huber.py ├──────── icons ├──────── ogse.py ├──────── refmodel.py └──────── single.py
Each of these .py files form a group of buttons in the above Task GUI. The __init__.py file is special, it defines camtest.csl as a package, and it defines the command to start the Task GUI [see XXXXX]. The icons folder contains the graphics for the task buttons and the application icon.
22.2. Defining a Task
Let’s build our own simple Task GUI and start with the most stated and useless function, Hello, World!. We will eventually build a Task GUI with tasks of increasing complexity and guide you through the different steps.
Create a folder yakka[5] that will be our Task GUI package. In the folder create an empty file __init__.py and a file named hello.py.
yakka ├──────── __init__.py └──────── hello.py
The hello.py file shall contain the following code:
from gui_executor.exec import exec_ui
@exec_ui(immediate_run=True) (1)
def hello_world():
print("Hello, World!")| 1 | Each task button in the Task GUI is actually a function that is decorated with the @exec_ui decorator. |
Make sure you are at the same directory level as the yakka folder and the execute the following command from your terminal. That will start the Task GUI as shown in the screenshot below.
PYTHONPATH=. gui-executor --module-path yakka
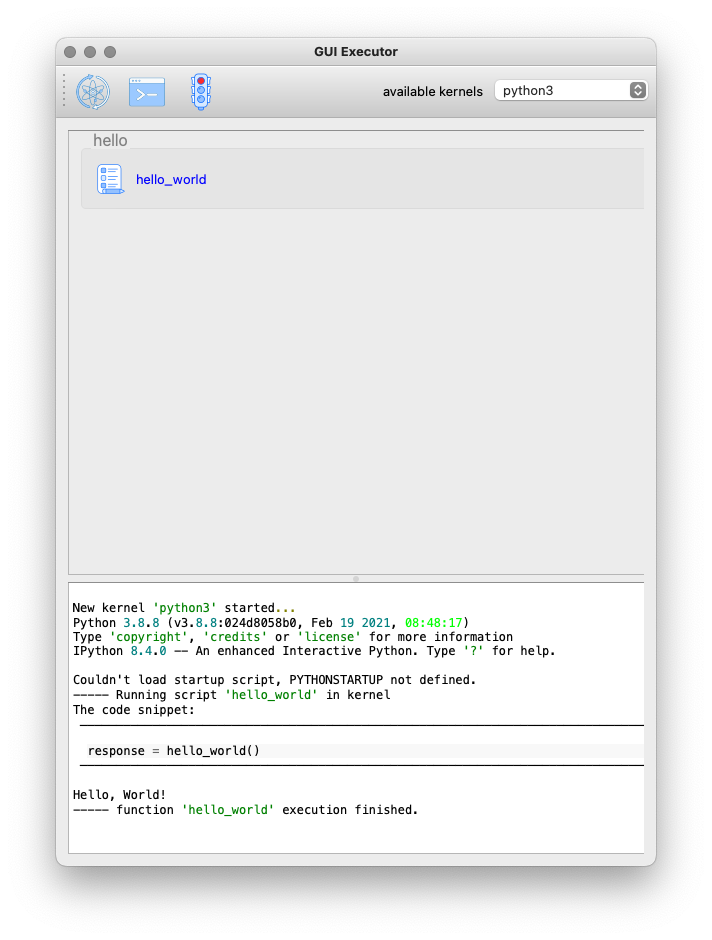
We see the task appearing in the screenshot above. The task text is blue which means it will run immediately when clicked. The tasks name is the name of the function and the task group name is the name of the .py file. The icon is the standard icon used for the task buttons. When you click the task button, the Console shows the following output:
----- Running script 'hello_world' in kernel (1) The code snippet: ────────────────────────────────────────── response = hello_world() (2) ────────────────────────────────────────── Hello, World! (3) ----- function 'hello_world' execution finished. (4)
What do we see in this output:
| 1 | The script is run in the kernel, that is the Jupyter kernel which is started when the Task GUI starts up. By default, the 'python3' kernel is used as you can see in the toolbar. |
| 2 | The code snippet that is run is shown between two horizontal lines. We see that the function is called without arguments and the return is catched in the variable response (which is None since the function doesn’t return anything). |
| 3 | The string 'Hello, World!' is printed when the function was executed. |
| 4 | A mark that the function execution has finished. |
Let’s add another task that takes an argument 'name' as a string with the default value of "John".
from gui_executor.exec import exec_ui
UI_MODULE_DISPLAY_NAME = "Hello Tasks" (1)
@exec_ui(immediate_run=True)
def hello_world():
print("Hello, World!")
@exec_ui(display_name="Hello...") (2)
def hello_you(name: str = "John"): (3)
print(f"Hello, {name}!")
-
if the global variable
UI_MODULE_DISPLAY_NAMEis defined, its value will be used as the name of the group of buttons in this module. -
You can give the task button a proper name instead of the function name.
-
The type hint for the argument and the default value are used in the arguments panel in the GUI.
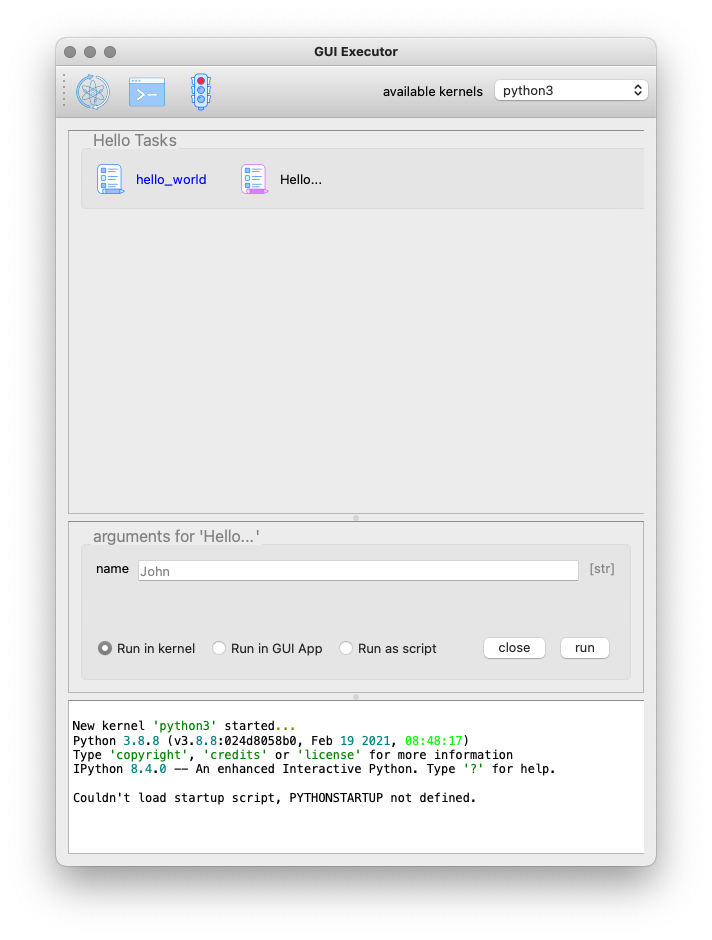
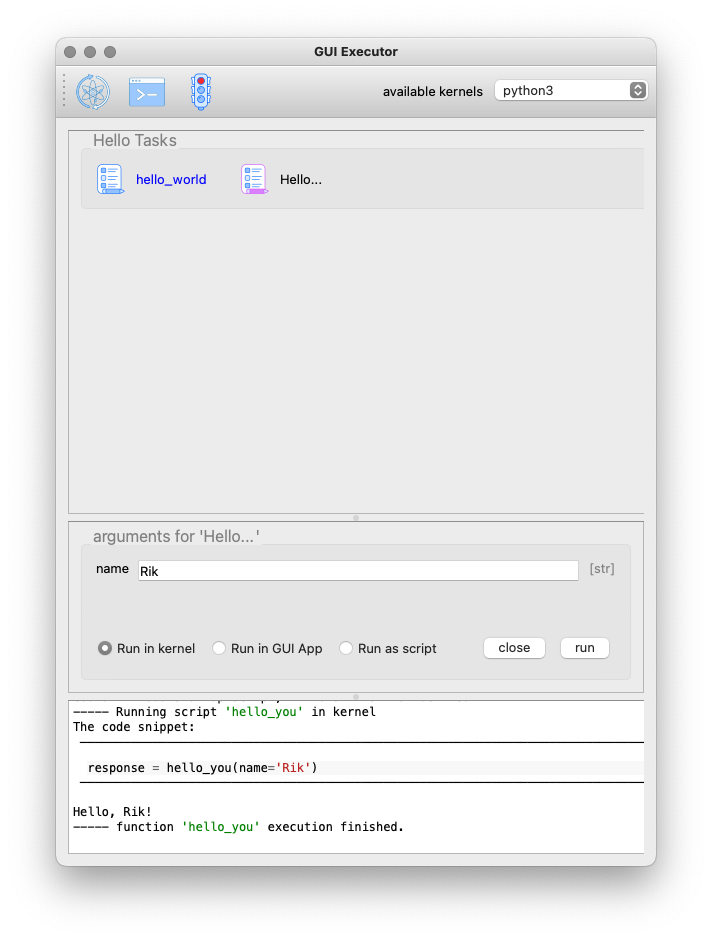
In the screenshot above, you can see the effect of the small changes we made in the hello.py. The tasks button group is now called 'Hello Tasks' and the new task we added got the 'Hello…' name instead of the function name. The new task icon has a different color because it’s is selected. You can also see in the arguments panel that the type hint is picked up and shown in grey and the default name is also filled in grey in the text field. When I put my name there and press the 'Run' button, you can see that the function is called with the proper argument.
22.3. The @exec_ui decorator
TBW
-
immediate_run
-
description
-
display_name
-
use_kernel, use_gui_app, use_script_app
-
input_request
-
icons
22.4. Type Hints and Defaults
TBW
-
supported type hints
-
defining a new type hint
-
ListList
-
Callback
22.5. Choosing your icons
TBW
-
PNG or SVG
-
normal and selected
-
what when
immediate_run=True
22.6. The Jupyter Kernels
TBW
-
Switching kernels and why
-
creating a new kernel
22.7. Running your tasks
TBW
-
Running in the kernel
-
Running as a script
-
Running as a GUI App
22.8. The __init__.py
TBW
-
creating a function to start the GUI in the background
-
add the command to the
setup.py
Part VII — Unit Testing and beyond
23. The Test Suite
-
pytest
24. Testing device Interfaces
The first step in the development of a device driver is to implement the direct interface to the device, e.g. the Ethernet or USB interface. In parallel to this step start implementing the simulator
There are several ways to test device interfaces since we have layered access to the devices. The direct access to a device is usually implemented in a <device_name>_devif.py module. If the device has an Ethernet connection, the class is usually called <device_name>EthernetInterface, e.g. OGSEEthernetInterface, for USB connected devices this would be <device_name>USBInterface, e.g. PM100AUSBInterface`.
When you have direct access to the device and it is not used in an operational environment, you can test the interface from the Controller class by directly instantiating this class and communicate with the device. If the device is used in an operation environment, you will benefit a lot if you have a simple simulator.
XXXXX - write a section on how to develop a simple instrument simulator. Take as an example OGSE and …
25. Code Reviews
| This section is not finished and needs further updates. Please send me any comments and suggestions for improvement. Thanks, Rik. |
This is a proposal for a software source code review for the Common-EGSE. Code review is in principle a continuing process. With every pull request in GitHub there should be one of your colleagues doing a quick review of your changes before they are accepted and merged. We will add a section in Contributing to the Code > Pull Requests explaining how to review the code changes from a pull request.
This section handles a slightly more formal code review that is required at certain milestones in the development process.
We will have a code review at TBD week.
The code review is done primarily for the following reasons:
-
Share knowledge: you write code for yourself, your colleagues, test operators, scientists and engineers. Each of them should have a certain understanding of the system, but not all at the same detail.
-
Maintainability: code should be understandable and at least two developers should know what the code does and why. These two developers are you and one of your colleagues.
-
Finding bugs and design flaws.
-
Consistent error and exception handling.
-
Consistent logging.
-
Finding functionality creep.
-
Proper testing: test coverage, functionality testing.
-
Development Principles: SOLID, DRY.
-
Meet coding standards.
Please remember that the purpose of the code review is not to reject the code, but to improve the code quality. Focus is on how easy it is to understand the code.
25.1. Who is part of this Code Review?
Developers: Rik Huygen, Sara Regibo, …
Instrument Experts: Pierre Royer, Bart Vandenbussche
Do we need more reviewers? The EGSE engineers from INTA and SRON? Somebody from the PCOT?
25.2. Planning
For each reviewer I will prepare an issue where you can check off the parts which have been reviewed. WHERE TO PUT THE REVIEW REPORTS/COMMENTS?
It is very important that the review is done in a timely fashion. We don’t want to be bothered with this for weeks.
Proposal for reviewer/review items:
Sara Regibo:
-
Commanding Concept
Nicolas Beraud:
-
Hexapod package
-
Stages package
Rik Huygen:
-
Image Viewer
-
Powermeter
-
Shutter
Pierre Royer:
-
GlobalState
-
Setup
Bart Vandenbussche:
-
Image Viewer functionality
25.3. What needs to be reviewed?
TODO: Make a checklist!
-
documentation:
-
API documentation at GitHub.io
-
-
docstrings: Do you understand from the docstring of the functions and public methods what the functionality is, what is needed as input and what is returned, if we need to catch exceptions?
-
coding style: Do I understand what the code does, is the control flow not too complicated, …
-
whatch-outs:
-
mutable default parameters
-
Be constructive!
Be specific!
The goal is to ship good and maintainable code, it’s not the goal to prove how good or clever we are.
25.4. Prerequisites
Before the code review, all the code will be run through a number of automated steps:
-
check for trailing white space;
-
check for end of file blank lines;
-
check format of the YAML files;
-
run the code through black to make sure we have a consistent formatting;
-
run the code through flake8 to make sure the style guide is being followed;
-
run all the test harnesses, preferably with hardware attached, but also with the simulators. Have the test coverage report ready.
There will be a specific release for the code review with tag code-review-2020-Q2.
Part VIII — Miscellaneous
Everything in this part of the manual needs to be worked on and relocated in one of the above parts/sections.
26. Set up your development environment
This section guides you through the installation of the Common-EGSE, test scripts, and configuration files on your development machine. The result will be a development environment where you can implement features and fix issues in both CGSE and TS, and be able to push these changes to your origin[6] after which you can make a pull request to the upstream repository (i.e. the IvS-KULeuven original).
| The commands in this section have been tested on a MacBook Pro running Ventura 13.4 and using iTerm2 with a bash shell. The Python version I use is 3.8.15 managed by pyenv. If you are using a different 'unix-like' environment and experience problems, raise an issue on the plato-cgse-doc repository and we will try to give you support asap. |
26.1. Create a GitHub account and request access
First thing to do is make sure you have access to GitHub and have a GitHub account (personal or professional) so we[7] can give you access to the relevant repositories. Therefore,
-
create a –free-of-charge– GitHub account on https://github.com
-
request access to the following GitHub repositories:
-
for CGSE, i.e. plato-common-egse,
-
for TS, i.e. plato-test-scripts
-
for CONF, i.e. plato-cgse-conf
-
26.2. Fork the repositories on GitHub
|
If you don’t know what a fork is, please spend some time to learn what it means. A good introduction can be found at GitHub documentation: fork a repo. For those who just need a refresher image: 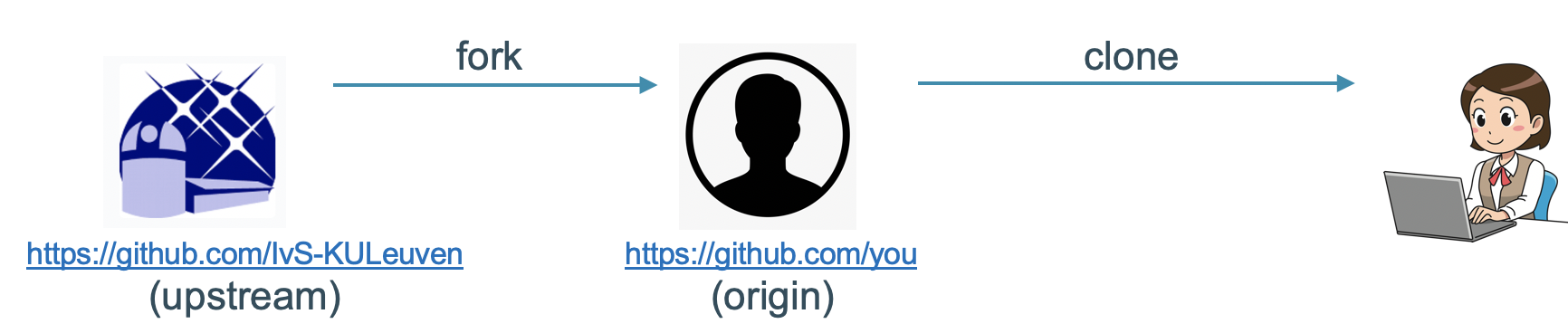
|
Make sure you have a fork of the repositories that you want to contribute to. Through this fork (which resides on the GitHub server) you will create pull requests. If you do not contribute to any code, you don’t need a fork and can clone the IvS-KULeuven repositories directly.
You can easily create a fork from the IvS-KULeuven repositories by the button in the top-right of the website.

The fork will be created in your personal GitHub account.
26.3. Clone GitHub repository
Execute the following code in a terminal. It will create a folder where all git repositories reside, then clone your fork of the plato-common-egse. A new folder will be created for plato-common-egse.
$ mkdir -p ~/plato-git-repos
$ cd ~/plato-git-repos
$ git clone https://github.com/<username>/plato-common-egse.git (1)
$ cd plato-common-egse| 1 | replace <username> with your GitHub account user name! |
You should do the same for the two other repositories, plato-test-scripts and plato-cgse-conf. Remember that you do not need a fork if you are not going to make changes to the repository, like e.g. for the configuration repo.
$ cd ~/plato-git-repos $ git clone https://github.com/<username>/plato-test-scripts.git (1) $ git clone https://github.com/IvS-KULeuven/plato-cgse-conf.git (2)
| 1 | replace <username> with your GitHub account user name! |
| 2 | the clone is here directly from the IvS-KULeuven repo |
You should now have three folders in your ~/git location:
$ ls -l total 0 drwxr-xr-x 8 rik staff 256 Jun 14 23:01 plato-cgse-conf drwxr-xr-x 28 rik staff 896 Jun 14 22:54 plato-common-egse drwxr-xr-x 16 rik staff 512 Jun 14 23:01 plato-test-scripts
26.4. Set up the environment variables
Add the following lines to a file that can be sourced into your terminal session, e.g. ~/.bash_profile. Preferably, you should use modules to maintain your environment.
export SITE_ID=KUL (1)
export PATH=$PATH:~/plato-git-repos/plato-common-egse/venv/bin:~/plato-git-repos/plato-test-scripts/venv/bin
export PYTHONPATH=~/plato-git-repos/plato-test-scripts/src:~/plato-git-repos/plato-common-egse/src:~/plato-git-repos/plato-common-egse/venv/lib/python3.8/site-packages
export PYTHONSTARTUP=~/plato-git-repos/plato-common-egse/startup.py
export PLATO_DATA_STORAGE_LOCATION=~/data/
export PLATO_CONF_DATA_LOCATION=~/plato-git-repos/plato-cgse-conf/data/${SITE_ID}/conf
export PLATO_LOG_FILE_LOCATION=~/data/${SITE_ID}/log
export PLATO_LOCAL_SETTINGS=~/cgse/local_settings.yaml
export PLATO_CONF_REPO_LOCATION=~/plato-git-repos/plato-cgse-conf/
| 1 | replace KUL with your favorite site id in upper case, CSL1, CSL2, IAS, INTA, or SRON. Beware that when you choose an unknown site id, you will have to provide all the site specific Setups, device driver implementations in test scripts etc. |
26.5. Create a Python virtual environment
Create a virtual environment for Python 3.8 (the version to be used for the CGSE and TS), then activate the venv and update pip and setuptools packages.
$ cd ~/plato-git-repos/plato-common-egse
$ python3.8 -m venv venv --prompt venv-cgse (1)
$ source venv/bin/activate
(venv-cgse) $ python -m pip install --upgrade pip setuptools wheel| 1 | the prompt will appear in your terminal, so you will know which environment you are using. |
Now install all the packages needed to run the CGSE and TS. These packages are installed from a requirements.txt file which is currently not yet added to the repository. The file can be downloaded from XXXXX.
(venv-cgse) $ python -m pip install -r requirements.txt (venv-cgse) $ deactivate
Also for the test scripts you will need to create a virtual environment. You won’t need to install any additional dependencies since all dependencies are installed in the CGSE virtual environment and this location was added to the PYTHONPATH above.
$ cd ~/plato-git-repos/plato-test-scripts $ python3.8 -m venv venv --prompt venv-ts
26.6. Install the CGSE
It’s now time to finally install the Common-EGSE as a developer installation, also called editable mode (-e or --editable). This means the CGSE will be installed as a normal package, only the source code will be linked to the actual checked out source tree in you project. The result is that any changes that you make to the code in your source tree will be used in subsequent executions of scripts or in the Python REPL[8].
$ cd ~/plato-git-repos/plato-common-egse $ source venv/bin/activate (venv-cgse) $ python -m pip install -e . (venv-cgse) $ deactivate $
and also do a developer install for plato-test-scripts:
$ cd ~/plato-git-repos/plato-test-scripts $ source venv/bin/activate (venv-ts)$ python -m pip install -e . (venv-ts) $ deactivate $
26.7. Start the core services
From the project folder, run the invoke task start-core-egse to start up the five core services.
$ cd ~/plato-git-repos/plato-common-egse $ invoke start-core-egse
You should now be able to see the core services running on your system:
$ ps -ef|grep _cs 459800007 15196 1 0 11:48AM ttys003 0:00.56 /Users/rik/git/plato-common-egse/venv/bin/python3.8 /Users/rik/git/plato-common-egse/venv/bin/log_cs start 459800007 15197 1 0 11:48AM ttys003 0:09.79 /Users/rik/git/plato-common-egse/venv/bin/python3.8 /Users/rik/git/plato-common-egse/venv/bin/sm_cs start 459800007 15208 1 0 11:48AM ttys003 0:14.22 /Users/rik/git/plato-common-egse/venv/bin/python3.8 /Users/rik/git/plato-common-egse/venv/bin/cm_cs start 459800007 15359 1 0 11:49AM ttys003 0:08.78 /Users/rik/git/plato-common-egse/venv/bin/python3.8 /Users/rik/git/plato-common-egse/venv/bin/pm_cs start 459800007 15370 1 0 11:49AM ttys003 0:07.35 /Users/rik/git/plato-common-egse/venv/bin/python3.8 /Users/rik/git/plato-common-egse/venv/bin/syn_cs start
|
The first time you start the core services after installation, the $ cm_cs load-setup 45 Then start the core services again with the invoke command. |
Now you can also start the process manager GUI with the following command:
$ pm_ui
If you get the following error of too many open files, increase the limit of open files with ulimit -n 4096 and restart the process manager GUI.
Too many open files (src/kqueue.cpp:62) Abort trap: 6
The process manager GUI should now start and show something like the screenshot below depending on the site id you have defined and the Setup ID you have loaded.
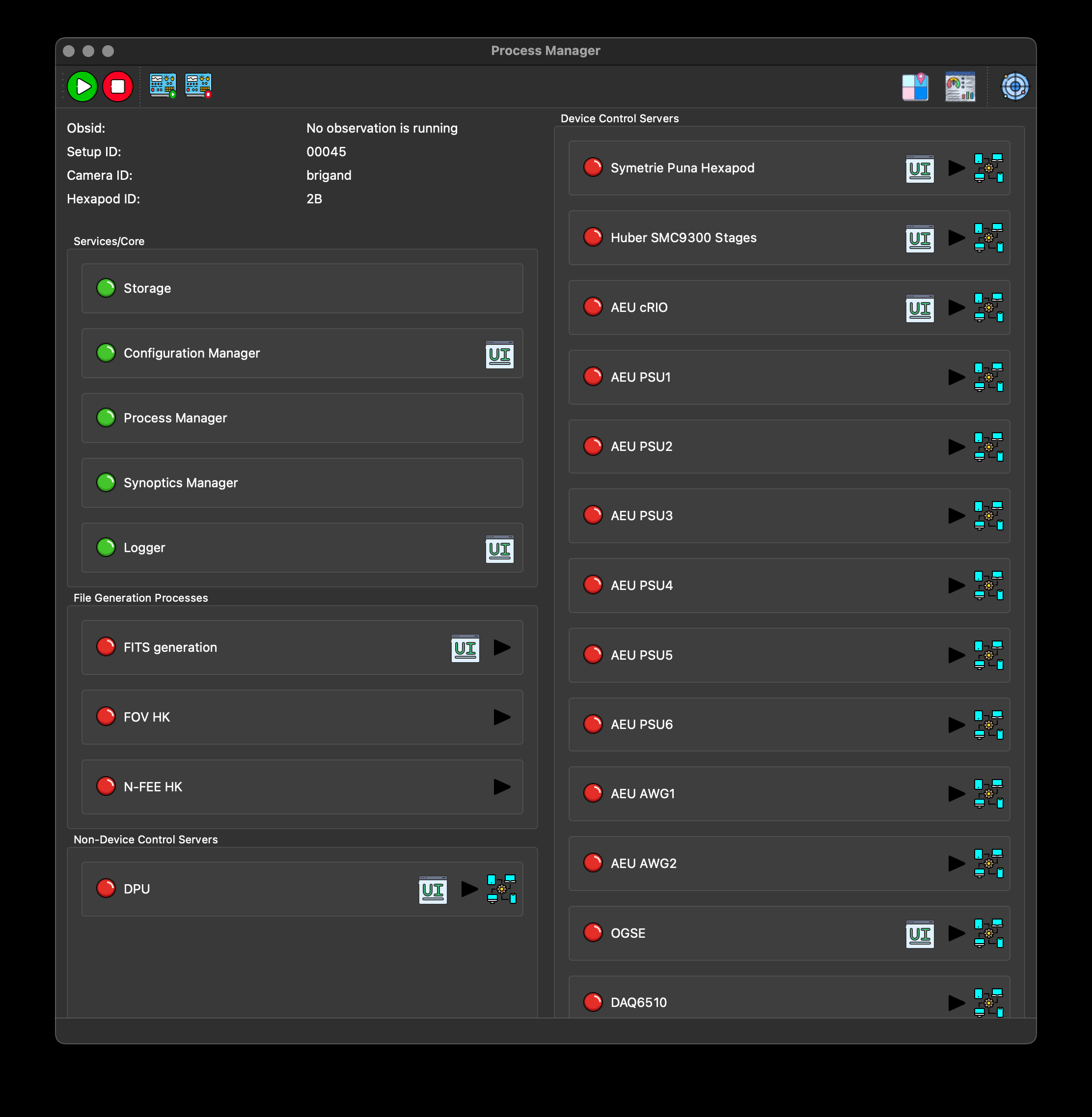
| If you try to start the Operator GUI from the toolbar, note that this will only work after you have also installed the test scripts. |
26.8. Updating the CGSE and TS
It’s important that you keep your local repo up-to-date with the upstream repositories. We have two commands defined for this, update_cgse and update_ts. There are however a few guidelines (or rules) that you have to adhere to in order to keep a clean development environment.
-
use branches! For each fix or feature that you are working on, create a separate branch off the develop branch. The git branches are very fast, so that is a cheap operation and it keeps your develop branch clean.
-
an update shall be done in the develop branch, so make sure you are on the develop branch and not in one of your feature or fix branches.
-
if you have uncommitted changes, you will not be able to update the develop branch or ven switch branches. To solve this, either commit the changes in the branch you are working before switching to develop. In the develop branch, there should be no changes as they should all be in the feature/fix branches. If, for some reason, there has been a change that you do not want to loose, stash these changes before starting the update and put them back afterwards.
$ cd ~/plato-git-repos/plato-common-egse $ git checkout develop $ (git stash) $ update_cgse develop $ (git stash pop)
$ cd ~/plato-git-repos/plato-test-scripts $ git checkout develop $ (git stash) $ update_ts $ (git stash pop)
You can request the version of the CGSE and TS as follows [for an explanation on version numbers, see Chapter 2]:
$ python -m egse.version CGSE version in Settings: 2023.24.0+CGSE (1) CGSE git version = 2023.24.0+CGSE-0-ga54e786b CGSE installed version = 2023.24.0+cgse $ python -m camtest.version CAMTEST version in Settings: 2023.24.1+TS (1) CAMTEST git version = 2023.24.1+TS-0-geedbdef
| 1 | of course on your machine, by the time you will execute these lines, the versions will be different. |
27. Terminal Commands
A lot of testing and monitoring can be done from the command terminal and doesn’t need a specific GUI or PyCharm. This section will explain how to check status of most of the control servers, how to inspect log files and HDF5 files, how to generate reports and how you can update the Common-EGSE and the test scripts.
27.1. What goes into this section
-
See cheatsheet CGSE → included below
-
describe all _cs commands and their options, when to use them and when NOT to use them
-
describe all _ui commands and their options
-
what other terminal commands are used
-
python -m egse (and all the other info modules)
-
python ../src/scripts/check_hdf5_files.py
-
python ../src/scripts/create_hdf5_report.py
-
export_grafana_dashboards
-
update_cgse → should become
cgse update -
update_ts → should become
ts update
-
-
Textualog, see Section 5.1
27.2. Often used terminal commands
| Command | Description |
|---|---|
|
Check which control servers are running. The names of all control servers end with _cs, except |
|
Terminate the command with the given process identifier (PID). The |
|
After you have sent a command to the background with |
|
Check the available disk space on the data and archive disks. The |
|
Most of the control servers generate metrics data that will be ingested in a Prometheus time-series database. The metrics can be inspected with this |
27.3. Often used git commands
The git commands need to be executed in the project folder or a sub-folder thereof, e.g. ~/git/plato-common-egse.
| Command | Description |
|---|---|
|
Check the status of the working directory. This is mainly used to list the files that have been changed and need to be added and committed before pushing to the repository. Sometimes these files need to be stashed before an update. |
|
Temporarily saves (stashes) the files that were changed in your working directory. Use this command to clear your working directory before updating the project. The |
|
Print the most recent tag which represents your installed version or release. If the |
|
Check the remote repositories that are known on your local copy. |
|
Print the branches known on your local repo. The current branch has an asterisk '*' in front of its name. The |
|
Fetch all changes from the remote |
|
Apply the changes from |

28. Stories
This section contains short stories of debugging sessions and working with the system that are otherwise difficult to explain in the previous sections.
28.1. Seemingly unrelated Process Manager Crash
Related to issue: no issue
The filter wheel control server (fw8smc4_cs) didn’t start when using the process manager GUI (pm_ui). When the button was clicked nothing happened, but we got some error messages in the logger:
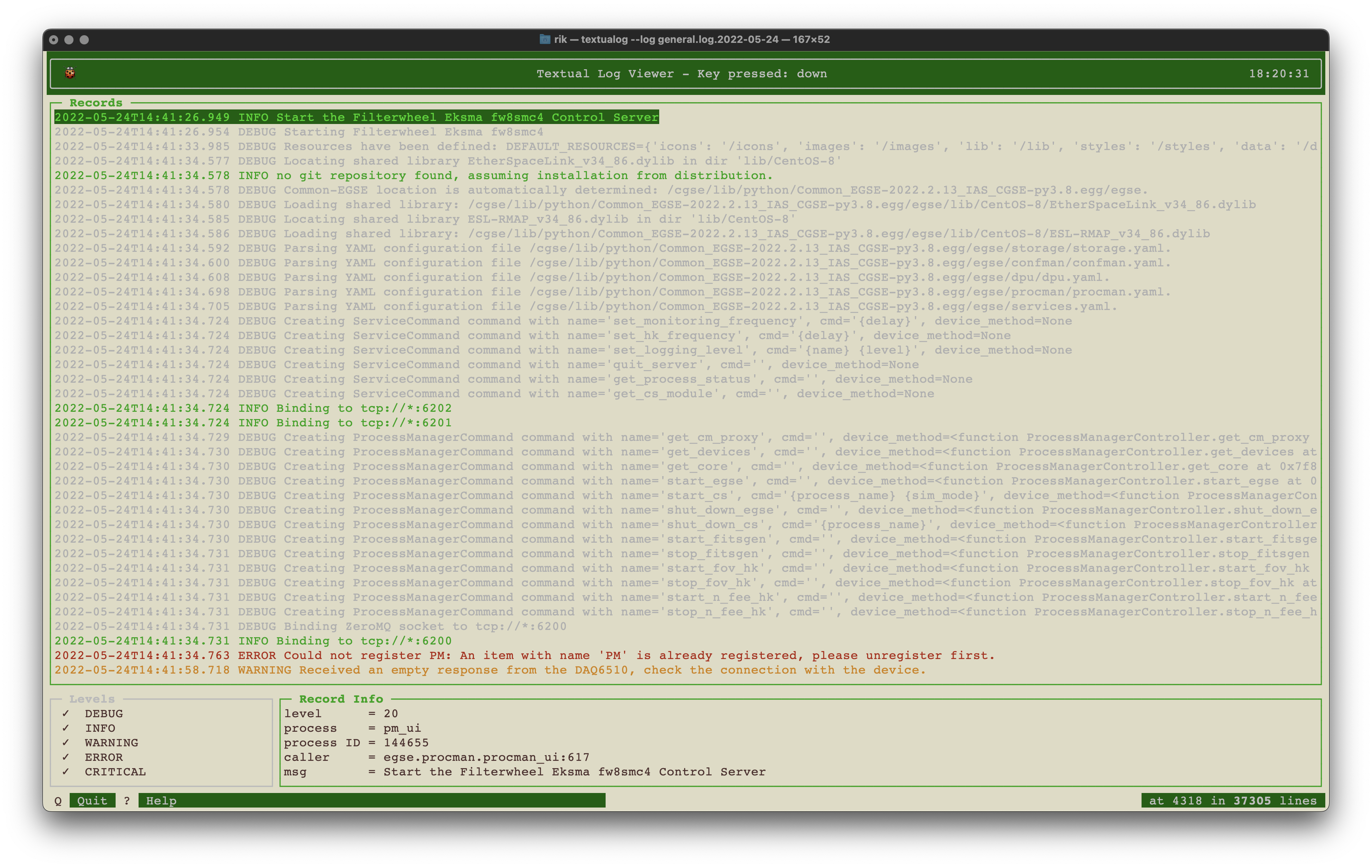
There was no clear error message except that the PM was already registered at the storage manager. We thought that could be due to the fact the pm_ui crashed already several times before, or maybe a STORAGE_MNEMONIC in the Settings that was not set correctly. So we checked the Settings YAML file, and also the local settings file. The command to do that is:
python -m egse.settings
We looked at the Setups and inspected the source of the filter wheel control server, but could not relate the problem to anything in the code. Especially, since the control server could be started without problem from the terminal.
fw8smc4_cs start
So we started to look into all kinds of settings that were important when starting a control server from the process manager, e.g. the DEVICE_SETTINGS variable that is expected in the module and should contain the definition of the ControlServer. XXXXX: xref to document/section explaining this. We fixed a number of these things, see for example PR #1963, but still the problem remained.
We were still confused about the message that the PM was already registered at the Storage Manager. Why does this appear here? Why would the process manager try to register again. Looking at the debug messages before the error, we saw that the process manager actually restarted. That’s of course the reason why it tries to register to the Storage, and the fact that it is already registered is probably due to the fact that the process manager crashed. So, instructing the pm_cs to start the fw8smc4_cs (by clicking the button in the pm_ui) crashes the process manager. And it is of course immediately restarted by the Systemd services.
So, we checked the logging messages of the Systemd for the pm_cs.services:
May 24 14:46:35 plato-arrakis pm_cs[2526576]: libximc.so: cannot open shared object file: No such file or directory May 24 14:46:35 plato-arrakis pm_cs[2526576]: Can't load libximc library. Please add all shared libraries to the appropriate places. It is decribed in detail in developers' documentation. On Linux make sure you installed libximc-dev package. May 24 14:46:35 plato-arrakis pm_cs[2526576]: make sure that the architecture of the system and the interpreter is the same May 24 14:46:35 plato-arrakis pm_cs[2526576]: System Exit with code None.
The problem seems to be that the pm_cs can not load the libximc shared library which is needed for the filter wheel control server. This works in the terminal, because there the LD_LIBRARY_PATH is set, but it is not known to the process manager control server. To fix this, the environment variable must be set in the /cgse/env.txt file that is used in the services file to start the pm_cs.services. The content of the files:
PYTHONPATH PLATO_CONF_DATA_LOCATION PLATO_CONF_REPO_LOCATION PLATO_DATA_STORAGE_LOCATION PLATO_LOG_FILE_LOCATION LD_LIBRARY_PATH
[plato-data@plato-arrakis ~]$ cat /cgse/env.txt PYTHONPATH=/cgse/lib/python/ PLATO_LOCAL_SETTINGS=/cgse/local_settings.yaml PLATO_CONF_DATA_LOCATION=/data/IAS/conf PLATO_CONF_REPO_LOCATION=/home/plato-data/git/plato-cgse-conf PLATO_DATA_STORAGE_LOCATION=/data/IAS PLATO_LOG_FILE_LOCATION=/data/IAS/log LD_LIBRARY_PATH=/home/plato-data/git/plato-common-egse/src/egse/lib/ximc/libximc.framework
and
[plato-data@plato-arrakis ~]$ cat /etc/systemd/system/pm_cs.service [Unit] Description=Process Manager Control Server After=network-online.target cm_cs.service [Service] Type=simple Restart=always RestartSec=3 User=plato-data Group=plato-data EnvironmentFile=/cgse/env.txt WorkingDirectory=/home/plato-data/workdir ExecStartPre=/bin/sleep 3 ExecStart=/cgse/bin/pm_cs start [Install] Alias=pm_cs.service WantedBy=multi-user.target
After this fix, the fw8smc4_cs could be started from the process manager GUI.
28.2. A non-closed socket is deeply buried in the code
So, I let myself work on a side track today and yesterday. I was doing some monitoring tests with the dummy control server and noticed that the Dummy CS would not properly terminate. It was hanging and it was not clear why.
I went through the whole chain of calls to close() functions on all sockets to find out if there was one still missing and if maybe I should use the linger=0 option etc. I placed log messages before and after all these actions, used different methods to stop and start sub processes, … It took me way too long to find out…
When I put logging statements around the term() call for the ZeroMQ context of the control server, I noticed these message never appeared. Thinking therefore the problem I was trying to solve would appear before these statements was again wrong. The reason they did not appear was that I close down all ZeroMQ logging handlers before I terminate the context, the logging level for the standard logger was set to INFO instead of DEBUG.
close_all_zmq_handlers()
logging.debug("Terminating the ZeroMQ Context.")
self.zcontext.term()
logging.debug("-bye-")So, I will have to use logging.info there instead.
Since the control server was hanging when terminating the ZeroMQ context, checking if some port number was still open sounded like a good idea. I found that a connection to the configuration manager commanding port (6000) was still open for the dummy_cs process (PID 36619 at that time):
$ lsof -i -P -n |grep 36619 python3.8 36619 rik 27u IPv4 0x283fbd58b2f1ab9d 0t0 TCP 127.0.0.1:58869->127.0.0.1:6000 (ESTABLISHED)
So, somewhere there must be a connection to the configuration control server that was not closed properly. I started searching the code and finally came to this piece of art (🙄) in the control.py module.
endpoint = proxy().get_endpoint()
if not is_control_server_active(endpoint, timeout=0.5):
MODULE_LOGGER.warning(f"The {endpoint} endpoint is not responding, {listener['name']} not un-registered.")
returnThis is in the unregister_as_listener() method of the ControlServer class and the idea behind this code was to quickly check if the CM CS was active before sending a command to it that takes more time (because we use 5 retries). Turns out to be a bad idea for several reasons.
-
We want to use the
is_control_server_active()function, but this needs theendpointfor the CS to contact, -
we don’t have the endpoint, but we can fetch it from the CS using the Proxy (!), so we used the Proxy to get the
endpoint, -
then we check if the CS is active, basically opening another Proxy and doing a
ping(), when its not active, we return otherwise we proceed. -
In both cases we forget to close/disconnect the Proxy (!)
| When possible, you should always use the Proxy as a context manager, the socket will then automatically be closed when leaving the context! |
So, why not directly using the Proxy with a short timeout. The Proxy does a ping() when entering the context. So, I came up with this snippet for now:
try:
with proxy(timeout=100) as x:
pass
except ConnectionError as exc:
MODULE_LOGGER.warning(
f"The {proxy.__class__.__name__} endpoint is not responding, {listener['name']} not un-registered." )
returnNow, the next question is if we do need this at all. In the register_as_listener() method, we don’t first check if the control server is active, so why did I think it is necessary here? There are some comments in the code that try to clarify this, but I will spill the beans, the unregister… method is usually called when shutting down the services and it might be that the configuration manager is already shut down at the time we want to unregister.
|
This solution has a drawback. Not all subclasses of Proxy allow to pass the timeout during construction, so when the NameError: name 'timeout' is not defined Actually, most of the Proxy subclasses do not have the timeout parameter, so we will leave that out. |
29. Miscellaneous
| Below this point we have miscellaneous topics that still need their place in the developer manual. |
This file contains sections that are not assigned a proper location in the developer document. When we are ready for one of the sections, just move it out into its dedicated file.
Sections below are copied from the Word document PLATO-KUL-PL-MAN-0003.
30. System Configuration
-
Which files to edit for configuring the system?
-
egse/settings.yamldo not edit this, instead edit the local_settings file pointed to by PLATO_LOCAL_SETTINGS environment variable.
-
-
Where do I describe which components are part of the system?
-
What if CSL has two Keithley DAQ6510 devices? How will they be distinguished?
30.1. System Components
This section describes the main components of the Common-EGSE system.
-
Storage Manager
-
Configuration Manager
-
Process Manager
-
Device Control Servers
-
System Under Test (SUT)
30.2. Data Flows
The Common-EGSE provides functionality to configure, control and/or readout the following devices:
-
Camera N-FEE and F-FEE, i.e. configure the camera and readout the CCDs
-
CAM TCS EGSE, i.e. thermal control of the TOU and FEE
-
AEU EGSE, i.e. provide secondary power and synchronisation to the FEE
-
Optical, e.g. control and attenuate laser light source
-
Mechanisms, e.g. hexapod, translation and rotation stages, gimbal
-
Thermal control or monitoring of test setup
All data that is output by any of these devices will be archived in global and/or test specific files. The file types and formats are described in section Error! Reference source not found. Error! Reference source not found..
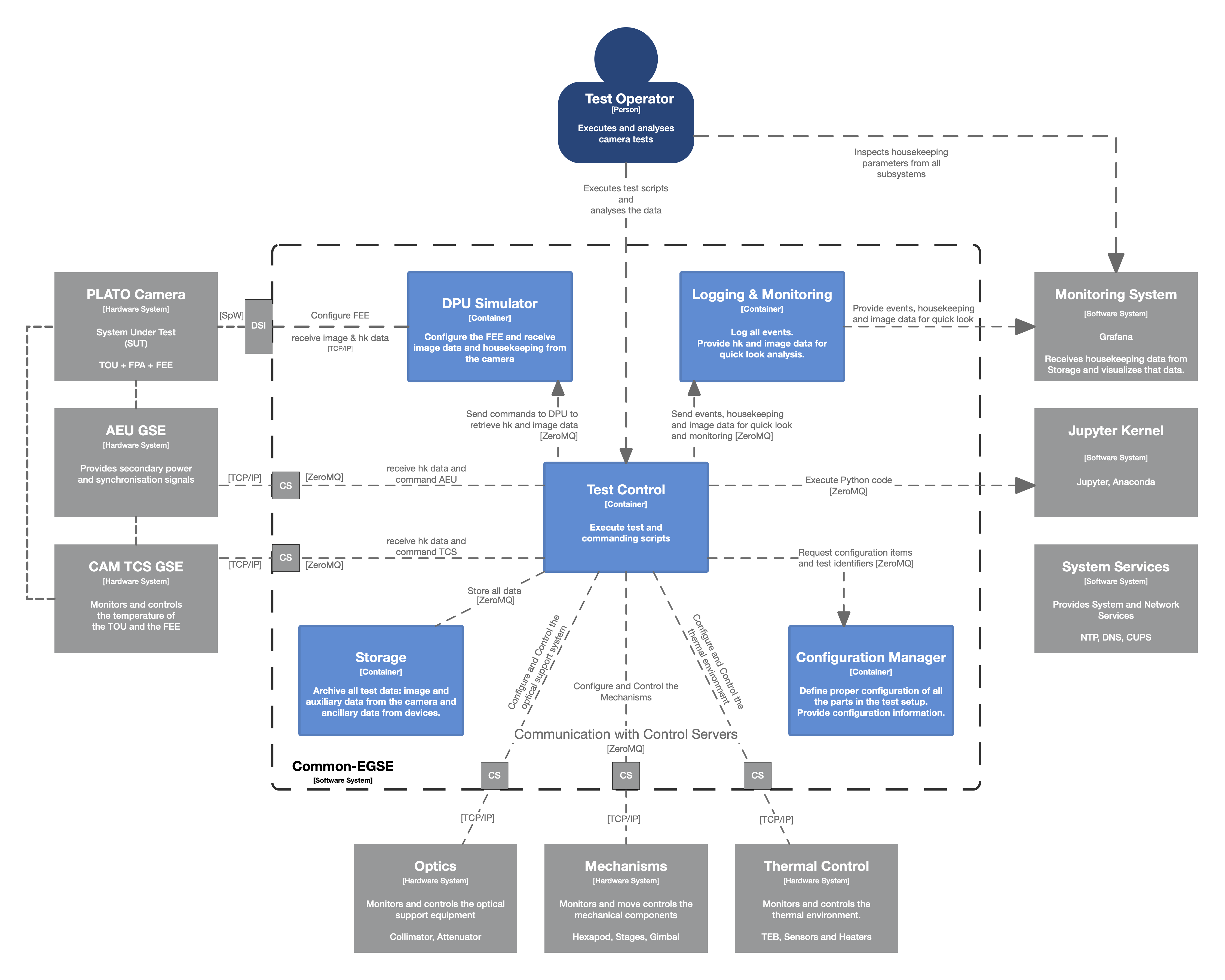
The Common-EGSE consists of several components, each with specific responsibilities, that communicate over a ZeroMQ network protocol. The following components have been identified and are part of the core functionality of the Common-EGSE:
-
Test Control: execution of test and commanding scripts
-
Configuration Manager: control the systems configuration
-
DPU Simulator: configuration of the FEE and readout of the CCD and housekeeping data
-
Logging: central logging component for status information and events
-
Monitoring: monitor crucial housekeeping and telemetry and perform limit checks
-
Storage: archive all data like images, housekeeping, telemetry, SpaceWire packets, commanding sequences etc.
Figure 1 above summarises the main components in the core Common-EGSE and test setup and defines their connections.
31. Installation and Update
The Common-EGSE software system is installed and updated via GitHub. The installation is more complex than a simple download-and-install procedure and is fully described in its installation guide [RD-01].
32. Getting Started
If you work with the system for the first time, you should go through the user manual [RD-02] to get familiar with the Common-EGSE setup, services and interactions. This section will explain how to log onto the Common-EGSE and how to prepare your development environment.
32.1. Log on to the System
-
Who does login to the system?
-
How, as which user, privileges is the user logged in?
-
What services are running anyway, started at system boot?
-
Developer Desktop versus operational desktop
32.2. Setting up the development environment
-
Git
-
Fork and clone the GitHub repository
-
Install the Common-EGSE system – see the installation guide [RD-01]
-
PYTHONPATH
-
Being in the right directory
-
PyCharm or another IDE